

End-to-end multi-target identification, tracking and prediction method
A target tracking, multi-target technology, applied in prediction, neural learning method, biological neural network model and other directions, can solve the problems of multi-target recognition, tracking and prediction prediction results are not accurate enough, can not be applied, etc., to improve the accuracy of trajectory prediction, The effect of accurate identification
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described in detail with reference to the accompanying drawings and embodiments.
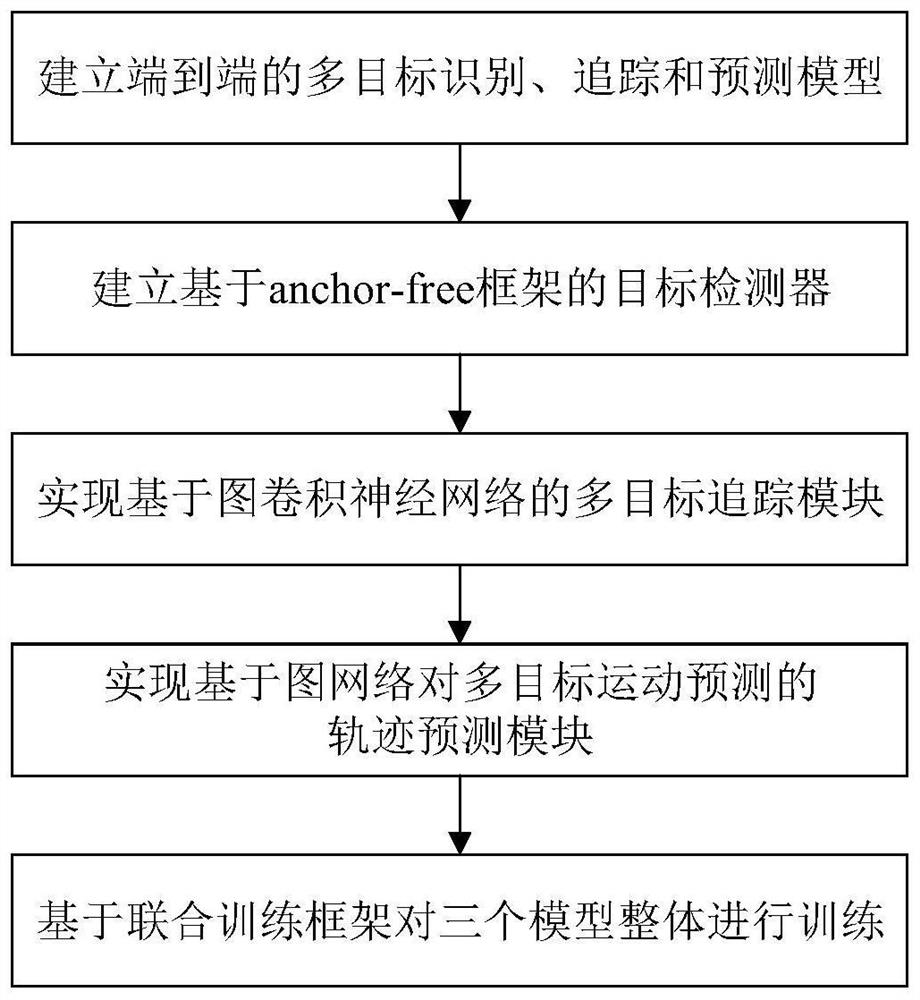
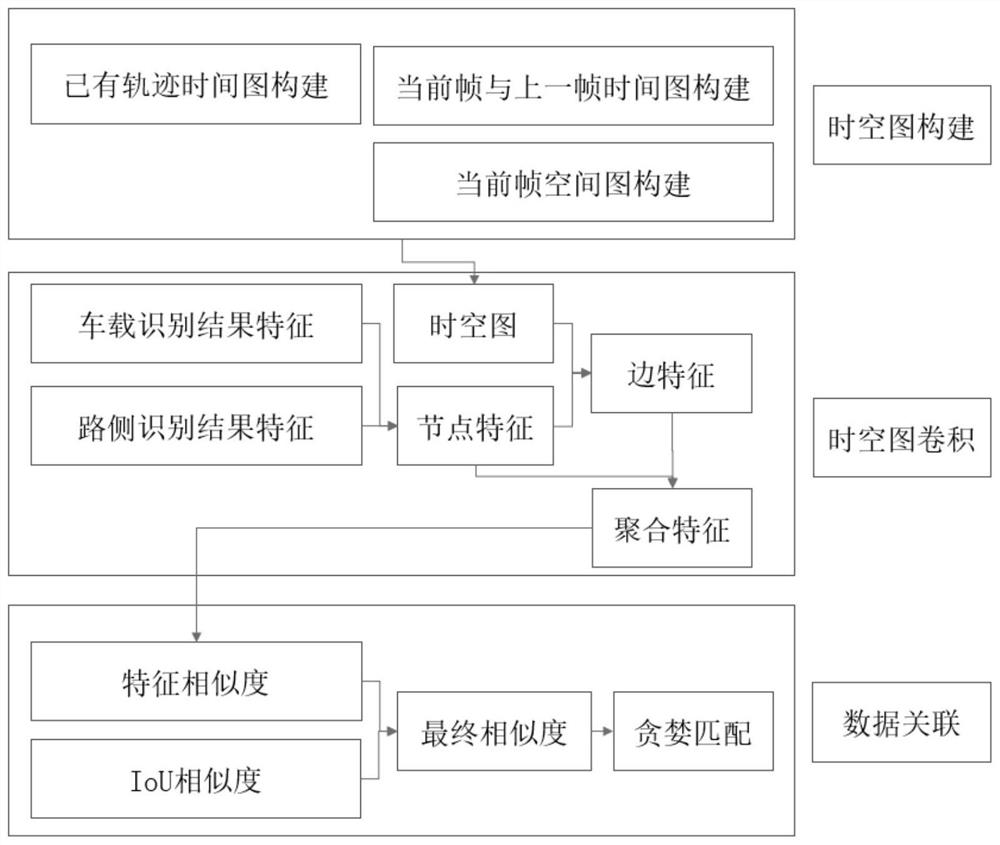
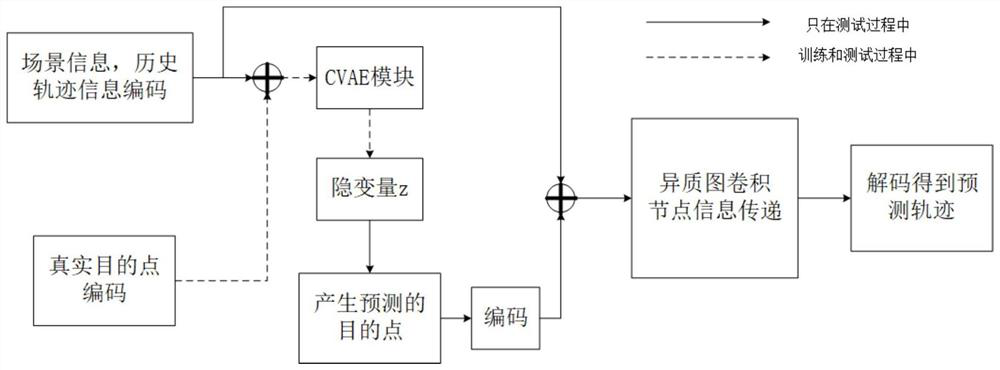
[0031] In view of the deficiencies in existing technologies in multi-target recognition, tracking and prediction, the purpose of the present invention is to construct an end-to-end multi-target recognition, tracking and prediction framework, which fuses the perception data of vehicle cameras and roadside cameras, according to Time clues and spatial topology construct a space-time 3D directed graph, and use the graph convolutional neural network to aggregate temporal and spatial feature information for tracking and prediction, obtain more recognizable features, and reduce occlusion and camera motion bands in the process of tracking and prediction In order to obtain the optimal trajectory prediction results, the accuracy reduction problem comes.
[0032] An end-to-end multi-target recognition, tracking and prediction method provided by the present inven...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More