

Sound control method and system based on human-computer interaction
A technology of human-computer interaction and acoustic tweezers, which is applied in the field of acoustic control methods and systems based on human-computer interaction, can solve the problems of low precision, incoherent and smooth path deviation, low spatial resolution of acoustic tweezers, and the inability to realize control, etc., to achieve Reduces the effect of difficult manipulation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] In order to make the purpose, technical solution and advantages of the present application clearer, the present application will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present application, not to limit the present application.
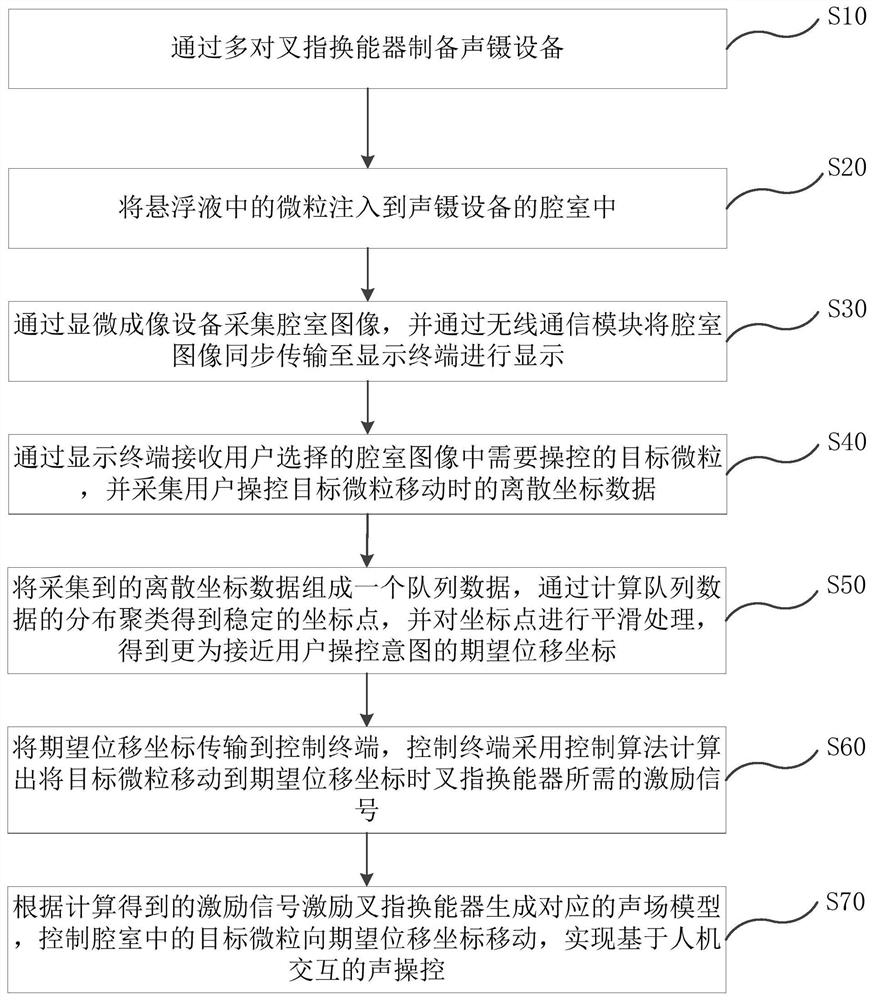
[0050] see figure 1 , is a flow chart of the sound manipulation method based on human-computer interaction according to the embodiment of the present application. The sound manipulation method based on human-computer interaction in the embodiment of the present application includes the following steps:
[0051] S10: Preparing an acoustic tweezers device through multiple pairs of interdigital transducers;
[0052] In this step, the acoustic tweezers device is a SAW (Surface Acoustic Wave, Surface Acoustic Wave) microfluidic chip, and multiple pairs of interdigital transducers are bound to t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More