

Point cloud completion method based on visual angle generator
Patent Information
- Authority / Receiving Office
- CN · China
- Current Assignee / Owner
- SOUTHEAST UNIV
- Publication Date
- 2022-04-05
Smart Images
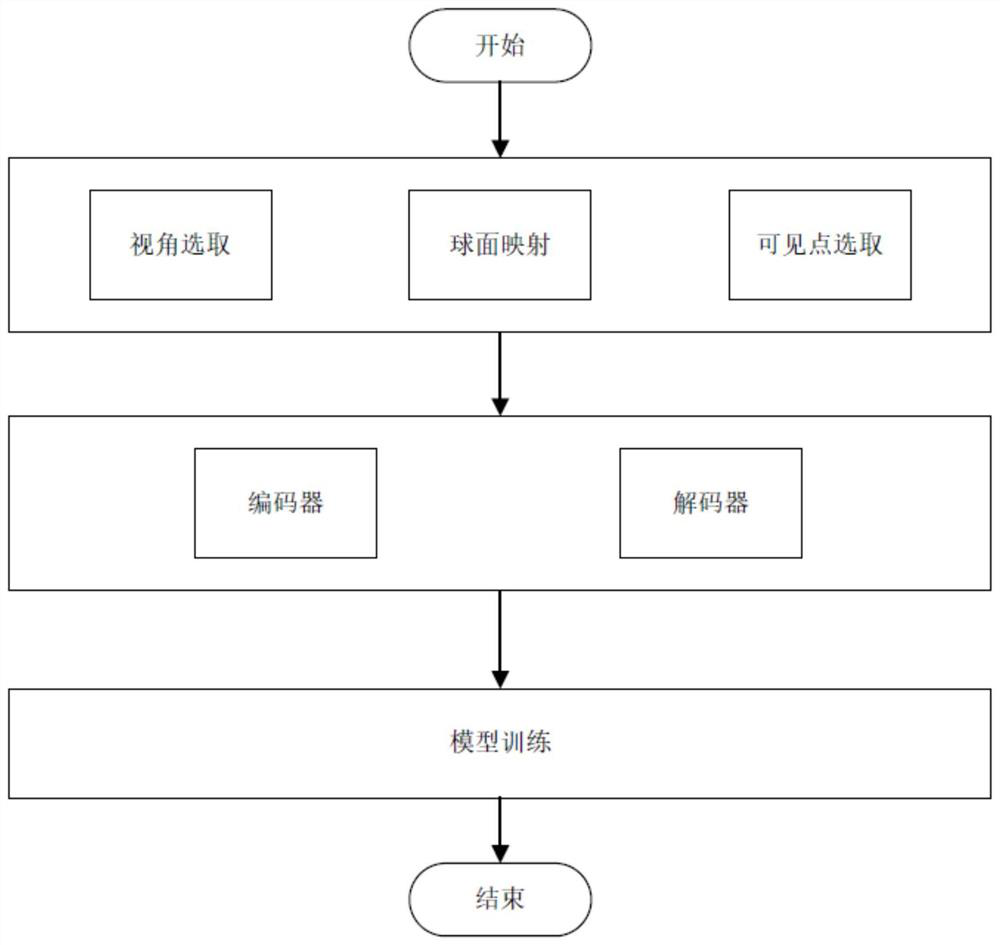
Figure 1 
Figure 2 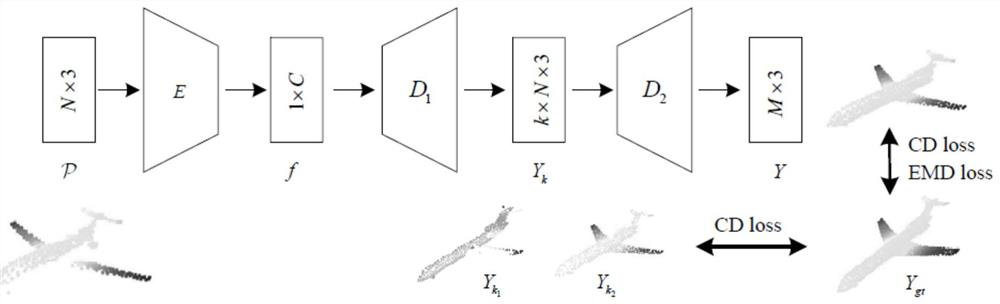
Figure 3
Abstract
Description
technical field
[0001] The invention belongs to the technical field of computer vision; in particular, it relates to a point cloud completion technology based on a viewing angle generator. Background technique
[0002] In recent years, point cloud completion tasks have attracted extensive attention in the fields of computer vision and robotics. Raw point cloud data acquired by devices such as depth cameras or lidars are often sparse and incomplete due to limitations such as resolution or occlusion. Incomplete 3D objects greatly limit its application in real life, such as object detection, scene segmentation and other downstream tasks. Therefore, it is very necessary to predict or infer the missing structure from the partially observed residual defect cloud, which has very important potential and value in the field of 3D vision, especially in application scenarios such as autonomous driving and robotics.
[0003] Many works have attempted to solve the point cloud completion...