

Design method of magnet swinging device
A technology of a swing device and a design method, which is applied in the directions of motor vehicles, transportation and packaging, manipulators, etc., can solve the problems of inability to achieve autonomous swing and can not be realized, and achieve the effect of improving the working range and adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] In order to make the purposes, technical solutions and advantages of the embodiments of the present application clearer, the technical solutions in the embodiments of the present application will be clearly and completely described below in conjunction with the drawings in the embodiments of the present application. Obviously, the described embodiments It is a part of the embodiments of this application, not all of them. Based on the embodiments in this application, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of this application.
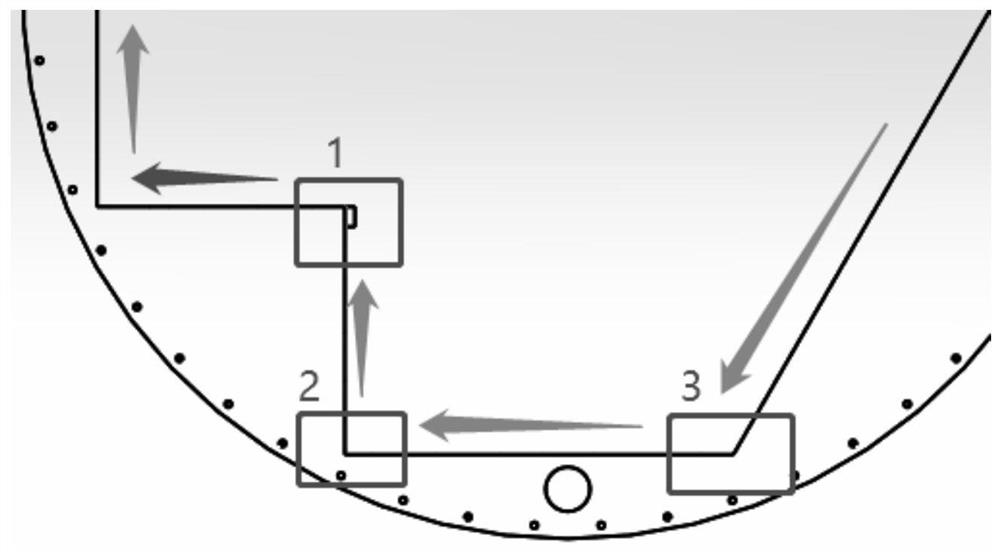
[0054] The aerial work robot is based on a lightweight design, so sector magnets are used. The company's existing magnetic adsorption robot magnets are fixed at the bottom of the robot, and can only move together with the robot, and cannot swing autonomously, so they cannot climb over figure 1 In 1, 2, 3 and similar positions, in order to solve these problems...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More