

Multi-joint bionic robot control system and operation control method
A bionic robot and control system technology, applied in the field of multi-joint bionic robot control systems, can solve problems such as poor detection effect and inability of bionic robots to adapt to complex environments, so as to solve the problem of poor detection effect and facilitate high-precision detection and resolution of the environment. Inability to adapt to the effects of complex environments
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
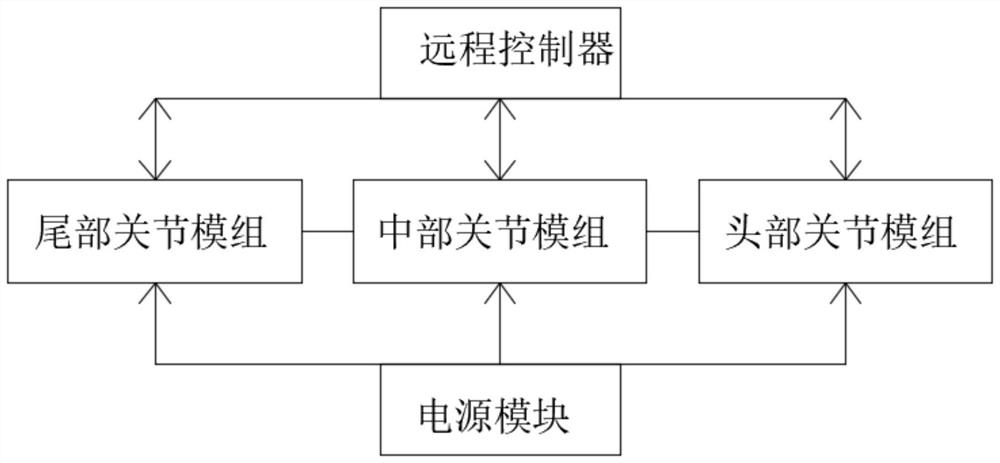
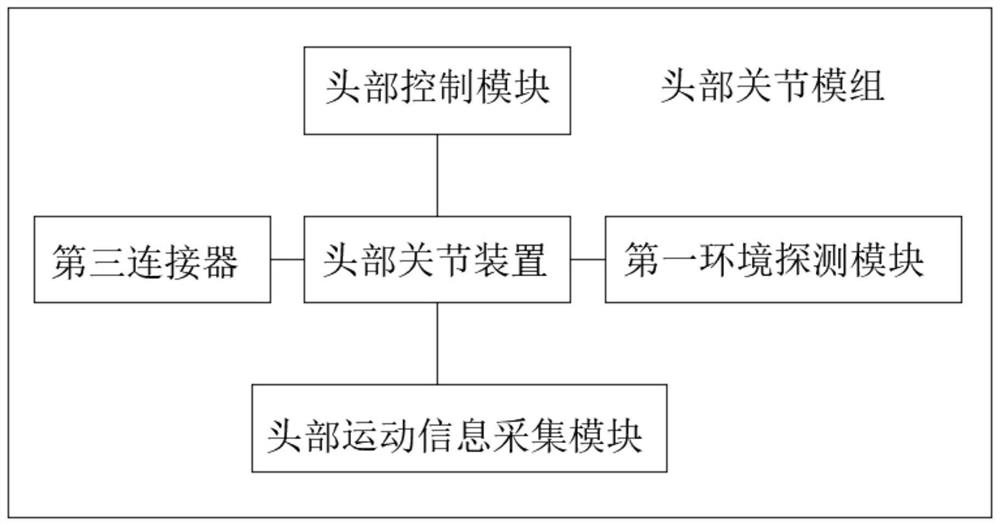
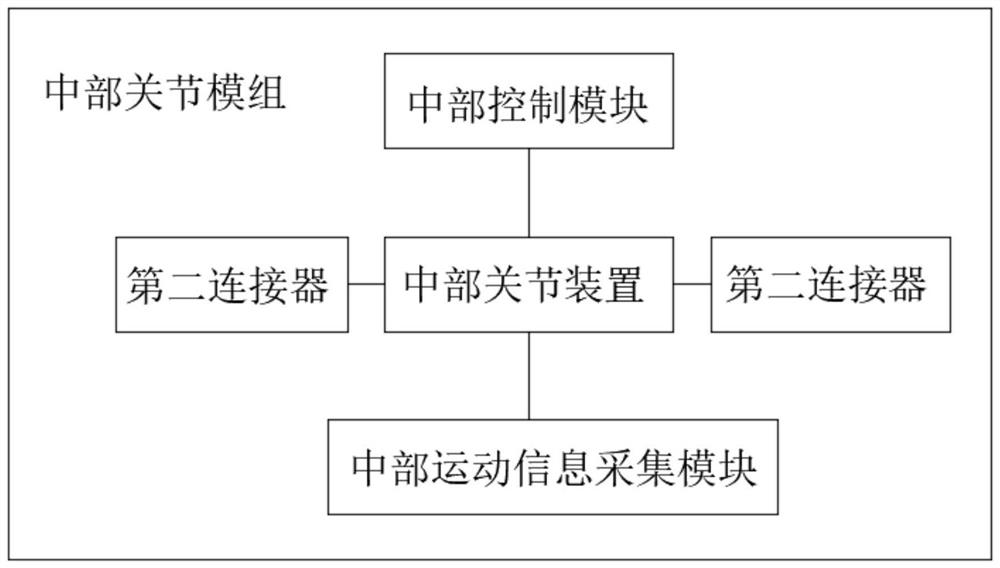
[0028] like Figure 1-Figure 5 As shown, the embodiment of the present invention provides a multi-joint bionic robot control system, including a remote controller, a power module, a head joint module, a middle joint module, and a tail joint module. module, the middle joint module and the tail joint module, the remote controller is used to remotely control the head joint module, the middle joint module and the tail joint module and can receive the data information uploaded by them, and the power module is One end of the head joint module is connected to one end of the middle joint module, and the other end of the middle joint module is connected to one end of the tail joint module. The head joint module can Adjust its own motion posture and collect environmental information and its own motion data information, and upload them to the remote controller at the same time. The middle joint module can adjust its own motion posture and collect its own motion data information, and uplo...
Embodiment 2
[0039] An operation control method for a multi-joint bionic robot control system, comprising the following steps:
[0040] S1. Supply power to the head joint module, middle joint module and tail joint module at the same time through the power supply module, and use the remote controller to control the head control module, middle control module and tail control module respectively, so as to make the multi-joint bionic robot Continuous movement, and the ability to remotely adjust the action posture of the multi-joint bionic robot;
[0041] S2. When the multi-joint bionic robot continues to move, use the first environment detection module to detect the environment information, and upload the environment information to the remote controller;
[0042] S3. By using the head motion information collection module, the middle motion information collection module and the tail motion information collection module to collect the motion information and motion posture of different parts of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More