

Self-rescue type pipeline detection robot
A pipeline inspection and robot technology, which is applied in the direction of pipe components, special pipes, mechanical equipment, etc., can solve the problems that the driving wheel is difficult to get out of trouble, and the inspection robot cannot be recovered safely, so as to achieve the effect of improving the ability of obstacle surmounting and the performance of obstacle surmounting
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
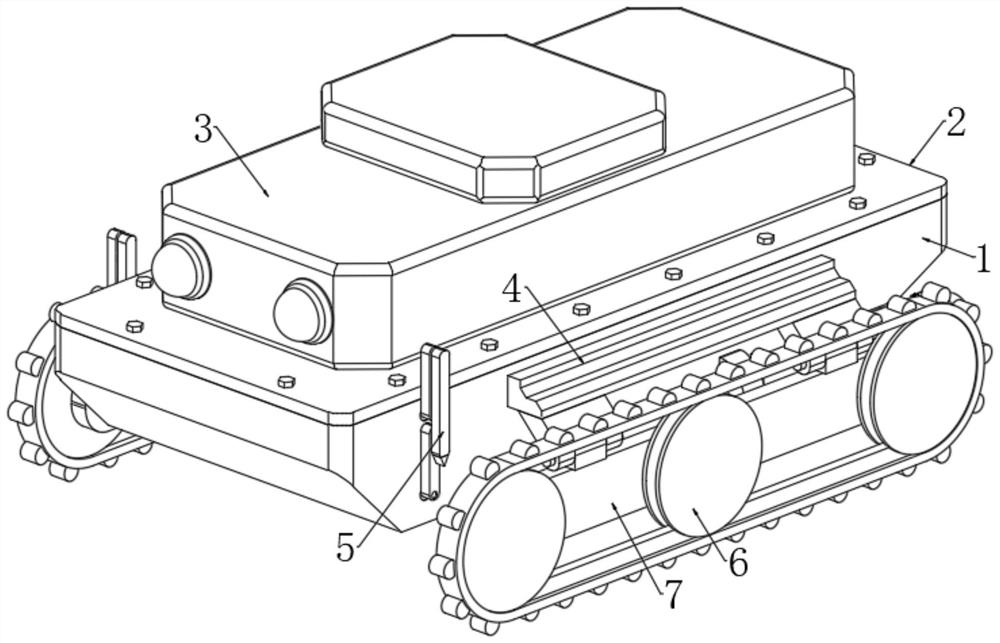
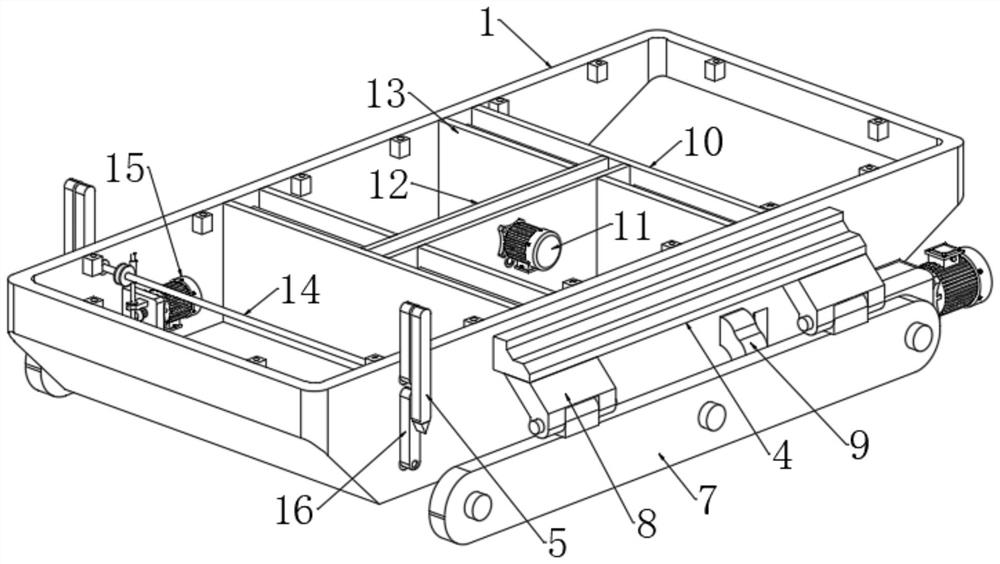
[0034] Refer to attached Figure 1-9 , a self-rescue pipeline detection robot, including a housing 1, a detector body 3 and two crawler drive mechanisms 6, the upper end of the housing 1 is provided with an opening, and the opening is fixedly connected with a cover plate 2 by bolts, the cover plate The upper end of 2 is fixedly connected with the lower end of the detector body 3, and two partitions 12 are fixedly connected in the housing 1, and an adjustment mechanism is connected between the two partitions 12, and the adjustment mechanism is connected with two support plates 7, two The crawler drive mechanism 6 is installed on the side walls of the two support plates 7 respectively, and the adjustment mechanism is used to change the distance between the two support plates 7, so as to realize the adjustment of the distance between the two crawler drive mechanisms 6, and also adjust the two simultaneously. The included angle between the support plates 7 enables the crawler driv...
Embodiment 2
[0036] Embodiment 2: the difference based on Embodiment 1 is;
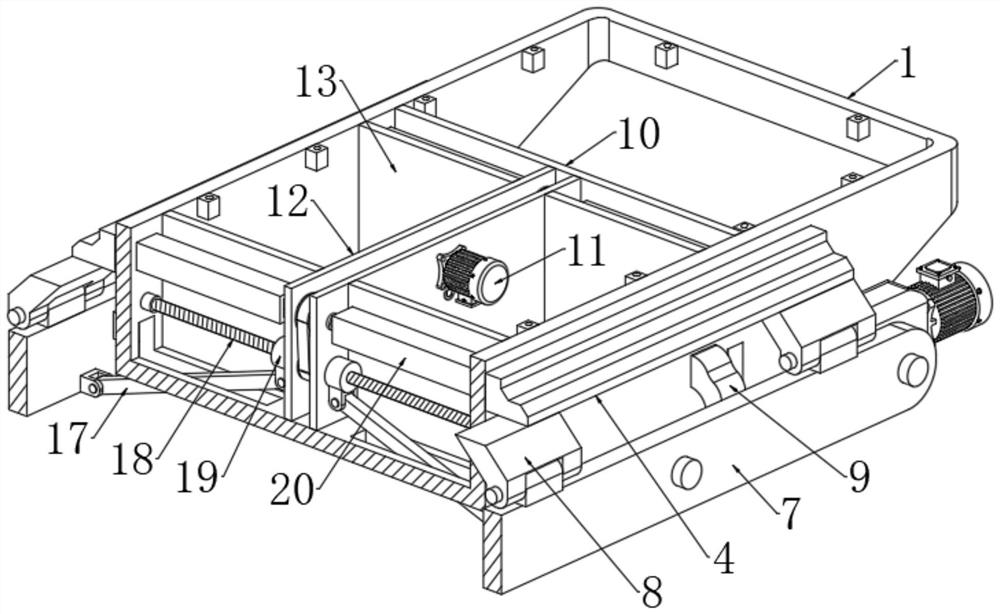
[0037] Refer to attached Figure 3-6 , the adjustment mechanism includes two first two-way screw rods 22 and second two-way screw rods 18, and the side walls of the two partitions 12 are connected to the rods of the two first two-way screw rods 22 and the second two-way screw rods 18 through sealed bearings. Two rectangular tubes 20 are sleeved on the left and right sides of the housing 1 through square holes, and the two rectangular tubes 20 are respectively sleeved on the rod walls of the two first two-way screw rods 22. The inside of the rectangular tubes 20 Fixedly connected with an internal thread block 21, and the internal thread block 21 is threadedly connected with the rod wall of the first two-way screw rod 22, the left and right sides of the housing 1 are provided with a support frame 4, and one side of the support frame 4 is connected to the two sides respectively. One end of a rectangular tube 20 is f...
Embodiment 3
[0040] Embodiment 3: the difference based on embodiment 1 is;
[0041] Refer to attached Figure 7-8 , the rescue mechanism includes two horizontal shafts 14, and both ends of the horizontal shafts 14 are rotationally connected to the inner side of the housing 1 through the second sealed bearings, and the two ends of the two horizontal shafts 14 pass through the second sealed bearings and are fixedly connected Swing arms 16 are arranged, wherein the two swing arms 16 on the same side are connected with push rods 5 through joint rotation of pin shafts, and the lower end of push rods 5 is connected with pyramid block 33, and one side of mounting plate 32 is connected with a A drive shaft 31, the two ends of the drive shaft 31 are fixedly connected with worms 28, the rod walls of the two worms 28 are meshed with worm gears 35, the worm wheels 35 are fixedly connected with the horizontal shaft 14, and the shaft walls of the drive shaft 31 The first bevel gear 29 is fixedly connec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More