

Follow-up loading device and method based on industrial robot system
An industrial robot and follow-up loading technology, which is applied in the direction of measuring devices, optical devices, instruments, etc., can solve the problem of large wing deformation and achieve the effect of follow-up loading
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
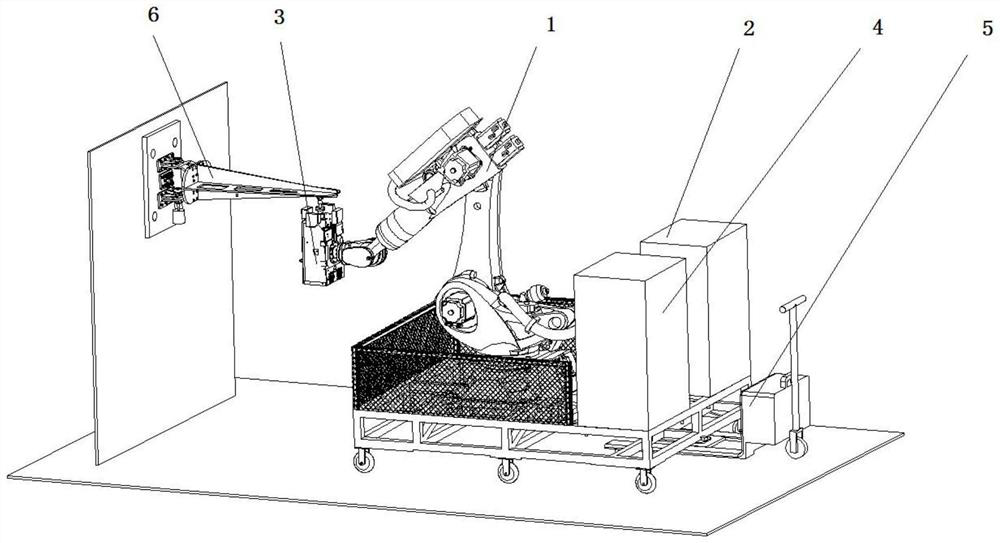
[0057] refer to figure 1 , The follow-up loading device based on the industrial robot system provided in this embodiment at least includes a control terminal 4, a follow-up loading end effector 3 and a normal direction measurement sensor.
[0058] The follow-up loading end effector 3 is installed on the industrial robot system.
[0059] The normal direction measuring sensors include a first group of ranging sensors and a second group of ranging sensors; the first group of ranging sensors and the second group of ranging sensors both include two and are symmetrically distributed on the loading end of the follow-up loading end effector 3 The distance-measuring sensor above, and the relationship between the connection line between the two distance-measuring sensors in the first group of distance-measuring sensors and the connection line between the two distance-measuring sensors in the second group of distance-measuring sensors is a vertical relationship.
[0060] The normal dire...
Embodiment 2
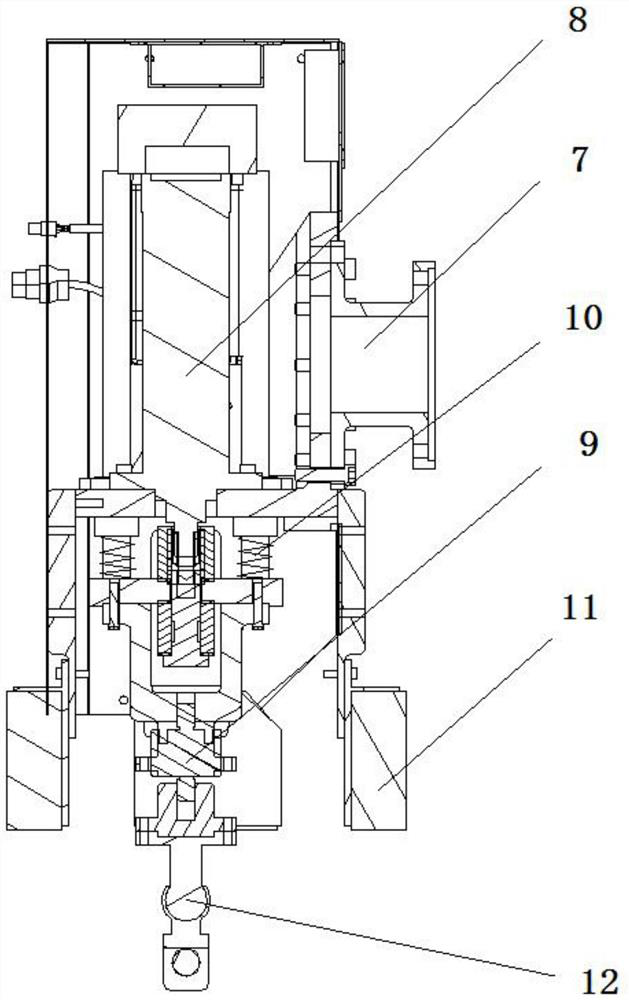
[0096] A kind of follow-up loading method based on the industrial robot system provided by this embodiment is to calculate the normal deviation value of the loaded point through the data measured by the normal measurement sensor 11, and then transmit it to the robot control cabinet 2 through the control terminal 4, The robot control cabinet 2 controls the robot body 1 and the follow-up loading end effector 3 to adjust the attitude according to the normal deviation value, and at the same time, the electric cylinder 8 on the follow-up loading end effector 3 is based on the force measured in real time by the tension and pressure sensor 9, Adjust the loading force output by the electric cylinder 8 to keep the loading force constant.
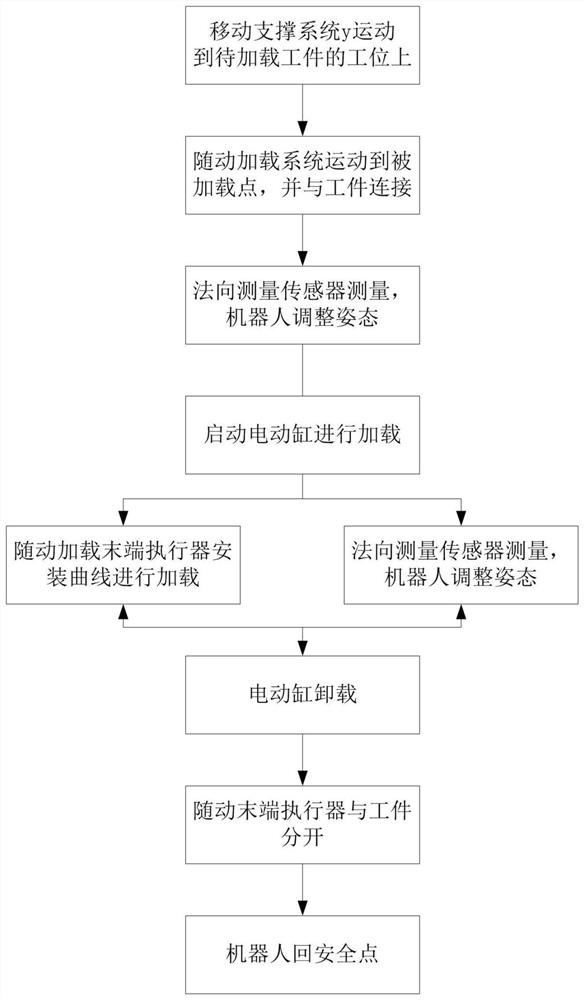
[0097] Reference attached figure 2 , the follow-up loading method specifically includes the following steps:
[0098] Step 1: The mobile support system drives the robot body, robot control cabinet, control terminal, etc. to the station where the work...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More