

Multi-unmanned aerial vehicle coverage path planning method for three-dimensional reconstruction
A technology covering paths and multi-UAVs, applied in the field of UAVs, can solve the problems of optimizing the energy consumption of UAV groups, and achieve the effects of reduced flight time consumption, effective data collection, and reduced path length
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments. For the step numbers in the following embodiments, it is only set for the convenience of illustration and description, and the order between the steps is not limited in any way. The execution order of each step in the embodiments can be adapted according to the understanding of those skilled in the art sexual adjustment.
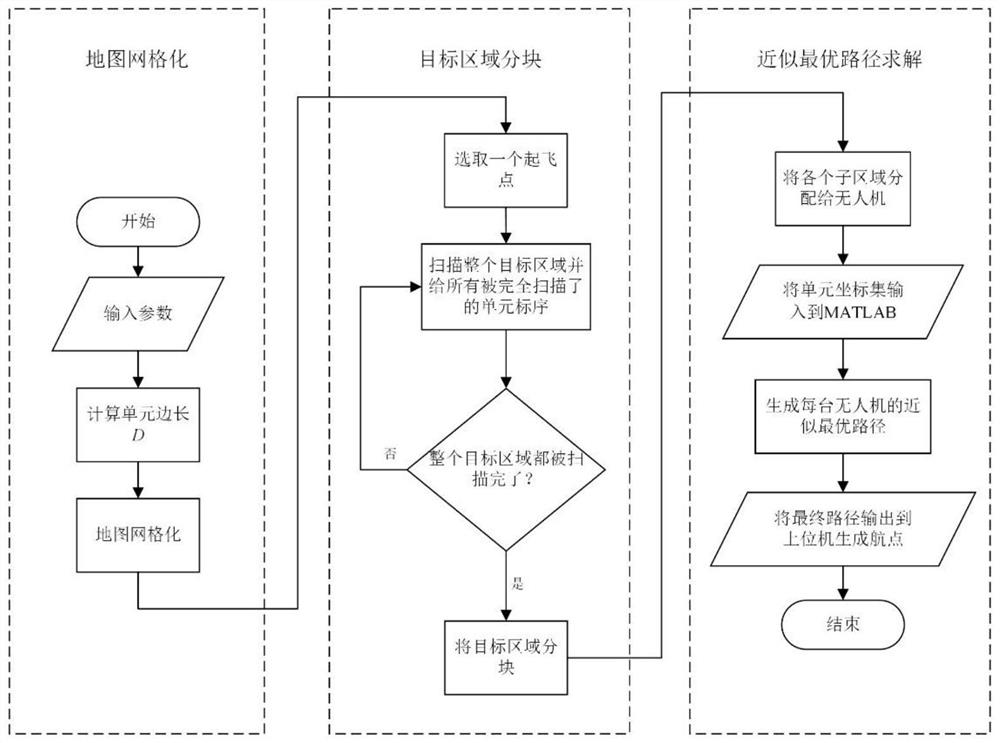
[0048] Such as figure 1 As shown, the present invention provides a method for multi-UAV coverage path planning oriented to three-dimensional reconstruction, the method comprising the following steps:
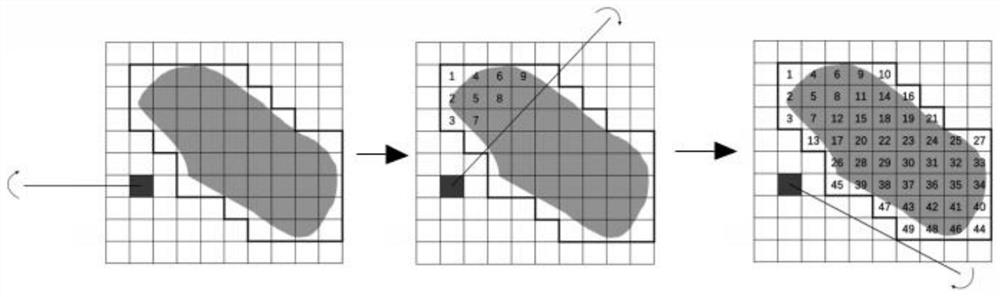
[0049] S1. Obtain the target area and perform grid segmentation on the target area to obtain a grid map;
[0050] S1.1. Determine the target area according to user needs;
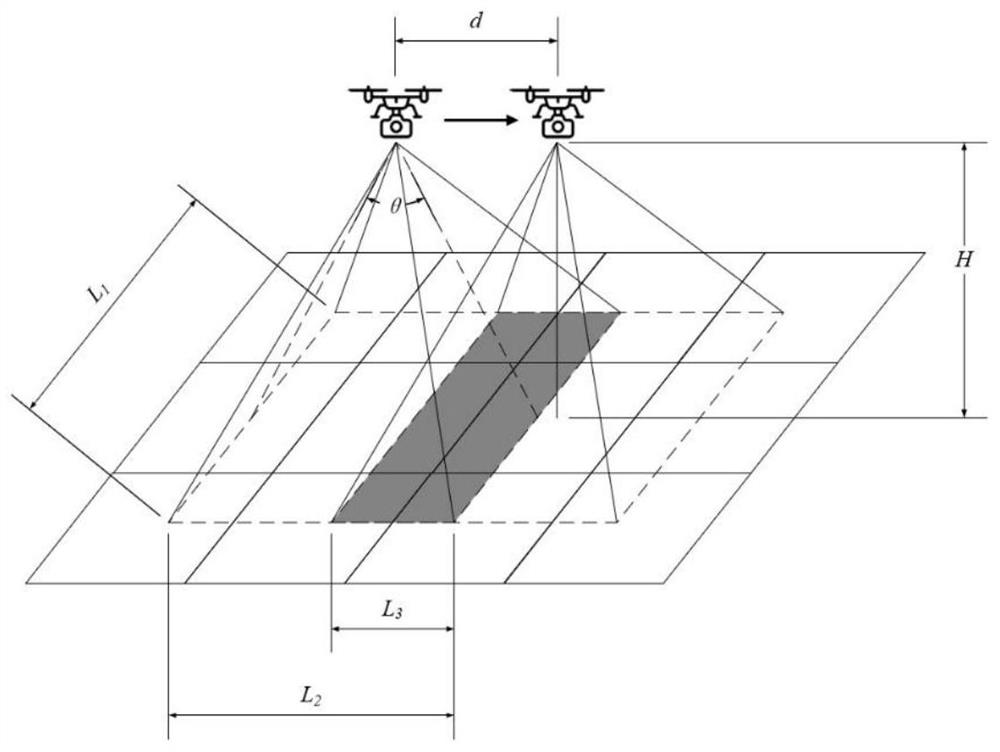
[0051] S1.2. Calculate the picture overlap according to the flying height of the drone, the distance between the shooting points and the field of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More