

Automatic shadow puppet arrangement method and system based on OpenPose model and robot kinematics
A robot kinematics and robot technology, applied in the field of robot interaction, can solve problems such as the lack of deeper capabilities, achieve the effect of reducing the time of arrangement and improving the efficiency of arrangement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0059] The present invention will be further described in detail below in conjunction with the accompanying drawings, which are to explain rather than limit the present invention.
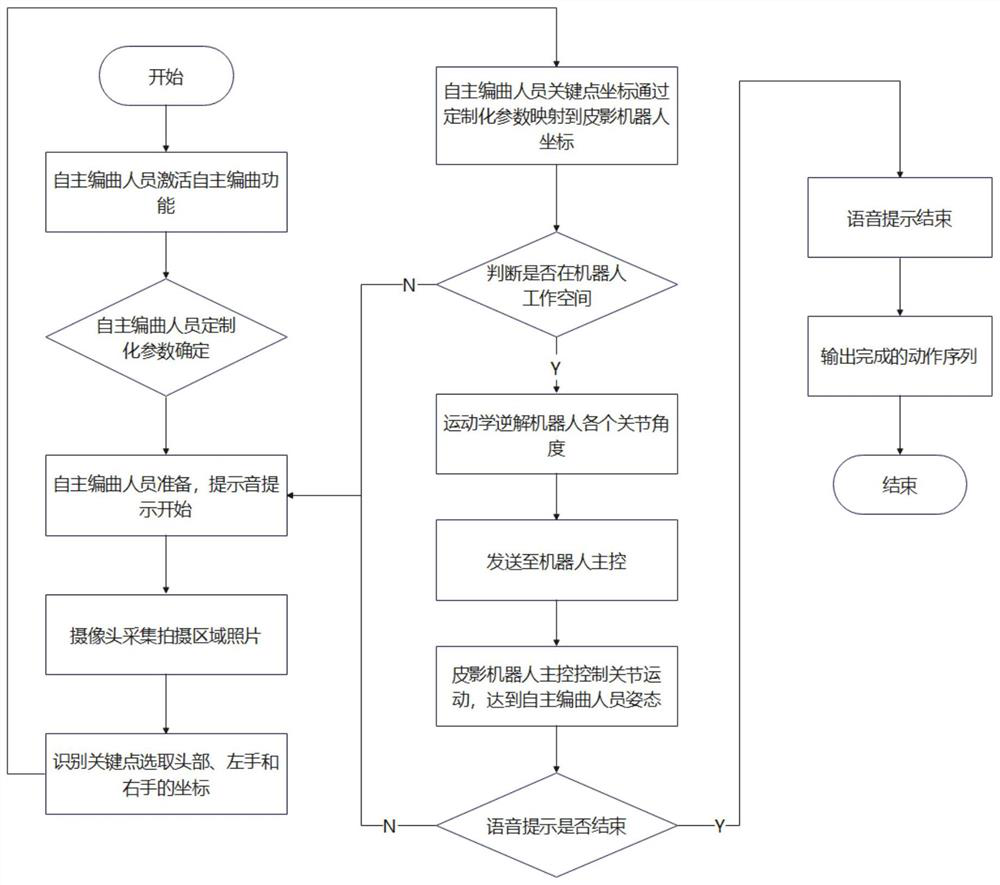
[0060] see figure 1 , an autonomous shadow puppet composition method based on the OpenPose model and robot kinematics, including the following steps:
[0061] Step 1. Establish an OpenPose model and train it to identify key nodes in human action pictures.
[0062] Specifically, the trained OpenPose model is used to identify the joint points of each frame of the human action image, and only three key nodes of the head, left hand, and right hand are retained.
[0063] see Figure 5 As shown, each frame of picture includes various joint points of the human body. Figure 5 It includes 0 to 17 joint points. In this embodiment, only three joint points of the head, left hand and right hand need to be reserved, and the corresponding serial numbers are 0, 4 and 7. The head, left hand and right hand of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More