Self-adaptive GPS fusion positioning system and method and medium
A fusion positioning and self-adaptive technology, applied in satellite radio beacon positioning systems, radio wave measurement systems, instruments, etc., can solve the problems of different data accuracy and incorrect matching, and achieve the effect of accurate pose estimation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
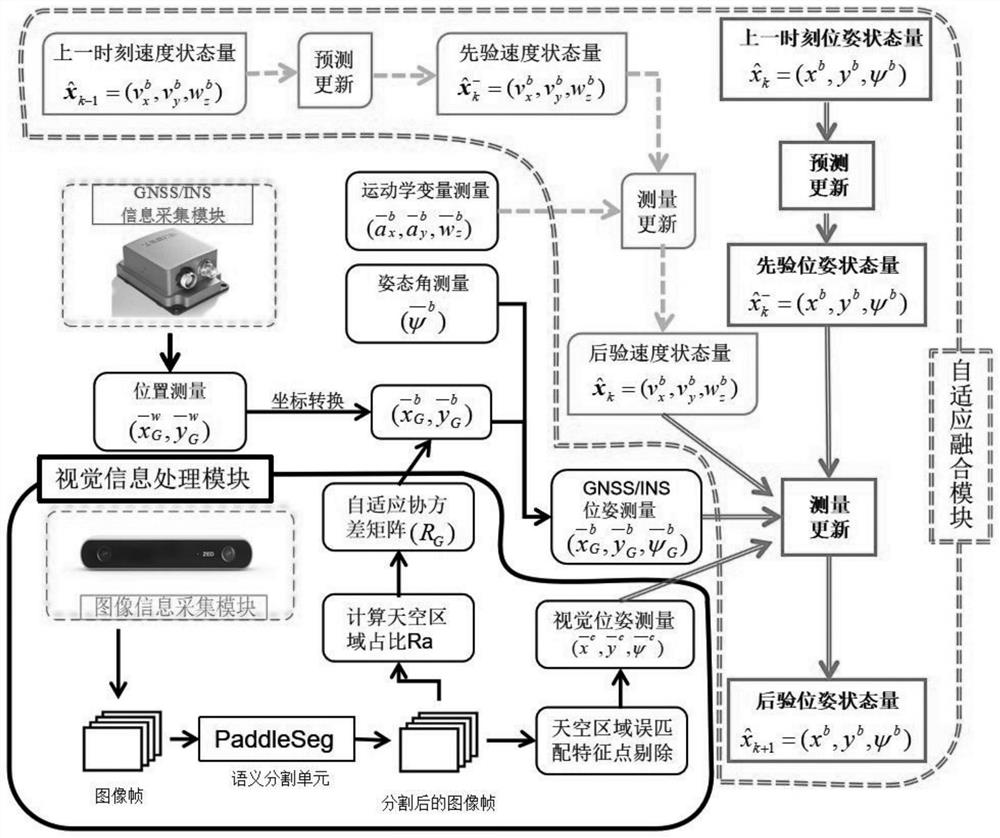
[0051] like figure 1 As shown, an adaptive GPS fusion positioning method, the hardware system includes three modules, namely a GNSS / INS information acquisition module, a visual information processing module and an adaptive fusion module, all the above modules are located on the same carrier, and the adaptive The fusion module fuses the data of the above two modules through a filtering algorithm, and calculates the optimal pose result of the carrier.
[0052] The GNSS / INS information collection module, in this embodiment, uses the xsense MTi-700 GPS / INS module for data collection.
[0053] Further, it includes a global satellite navigation system and an inertial navigation system, wherein the global satellite navigation system acquires and tracks satellites through a GNSS receiver to obtain a navigation solution, that is, the longitude and latitude data where the receiver is located, and the inertial navigation system uses a three-axis accelerometer, three Axis gyroscope, thre...
Embodiment 2
[0127] A storage medium on which a computer program is stored, wherein the computer program implements the fusion positioning method when the computer program is executed by a processor, comprising:
[0128] GNSS / INS information collection module: including global satellite navigation system and inertial navigation system;
[0129] Visual information processing module: It is used to collect the image of the area in front of the carrier, and after semantic segmentation, the area ratio of the sky area in the original image is obtained, and the pose data is further obtained;
[0130] Adaptive fusion module: obtain the estimated pose after filtering by dynamically adjusting the estimated weight of GPS data in the Kalman filter fusion process based on the proportion of the sky area in the original image;
[0131] The above modules are all arranged on the same carrier.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com