Robot gait optimization method
An optimization method and robot technology, applied in attitude control and other directions, can solve problems such as robot walking failure, multiple biped robot cooperation disasters, biped robot falling, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
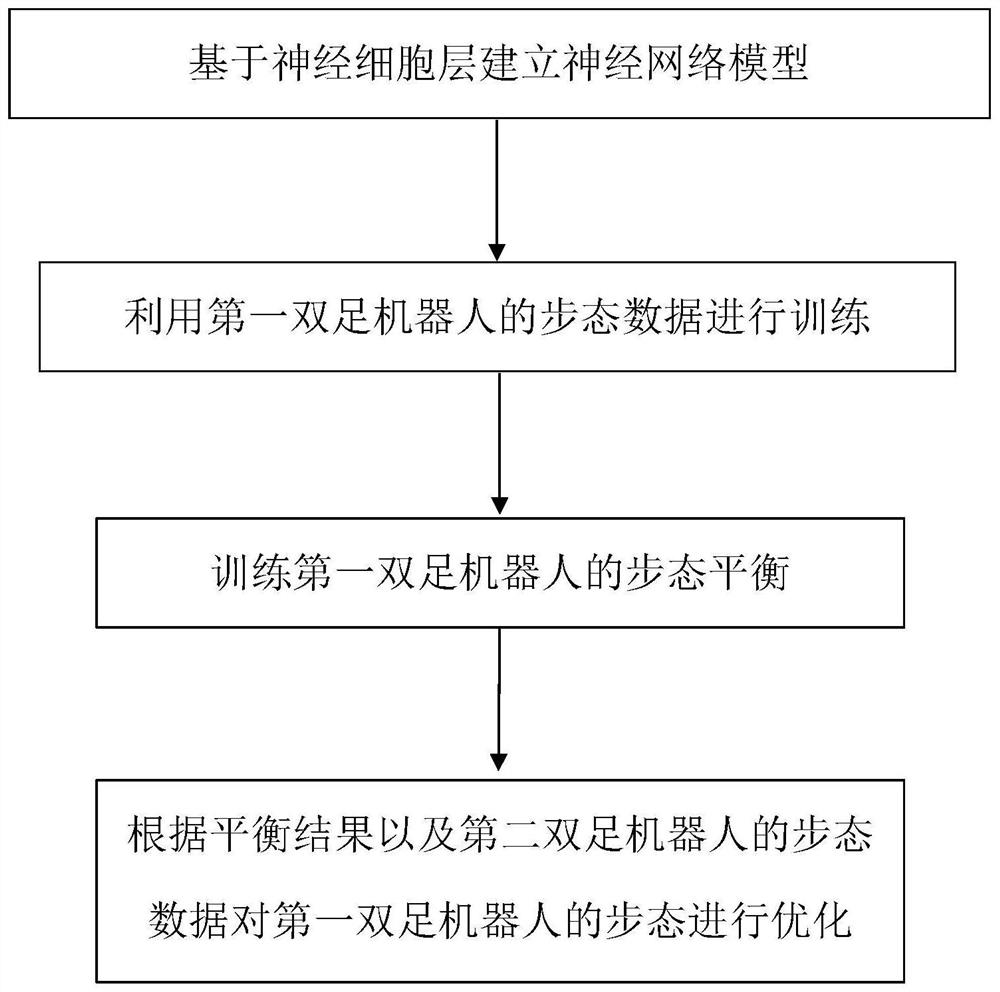
[0023] A robot gait optimization method is used for optimizing the gait of a first biped robot, including: establishing a neural network model based on a nerve cell layer, and using the gait data of the first biped robot obtained by a gait measurement device. training, and training the gait balance of the first biped robot; optimizing the gait of the first biped robot based on the balance results and the gait data of the second biped robot.
[0024] Preferably, both feet, ankle joints and knee joints of the robot have three degrees of freedom.
[0025] Preferably, the gait data includes angular velocity and acceleration, and the angular velocity and acceleration are angular velocity and acceleration in the forward direction.
[0026] Preferably, the gait measurement device includes a gyroscope and an accelerometer.
[0027] Preferably, the training on the gait data includes:
[0028] obtaining road surface information data, wherein the road surface information data at least ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com