

Dynamic ship supervision and control algorithm based on radar surrounding
A control algorithm, radar technology, applied in the reflection/re-radiation of radio waves, instruments, measuring devices, etc., can solve problems such as accuracy reduction, and achieve the effect of improving accuracy, high-efficiency transmission, and expanding the scope of supervision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
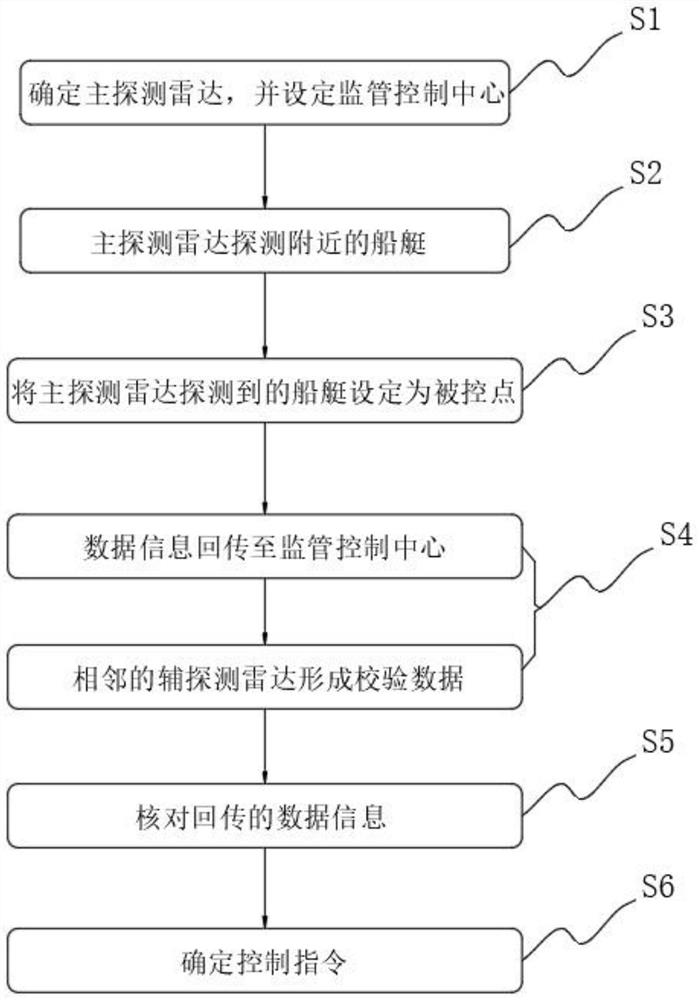
[0045] see figure 1 As shown, the purpose of this embodiment is to provide a dynamic monitoring and control algorithm for ships based on radar surround, including the following method steps:
[0046] S1. Determine the main detection radar, and set the vessel where the main detection radar is located as the supervisory control center;
[0047] S2. The supervisory control center detects nearby ships through the main detection radar;
[0048] S3. Set the ship detected by the main detection radar as the controlled point, and the detection radar carried on the controlled point as the auxiliary detection radar;
[0049] S4. The data information detected by the auxiliary detection radar is sent back to the supervision and control center, so as to increase the detection area of the supervision and control center, and the adjacent auxiliary detection radars form verification data during the return process;
[0050] S5. The supervision and control center checks the returned data inf...
Embodiment 2
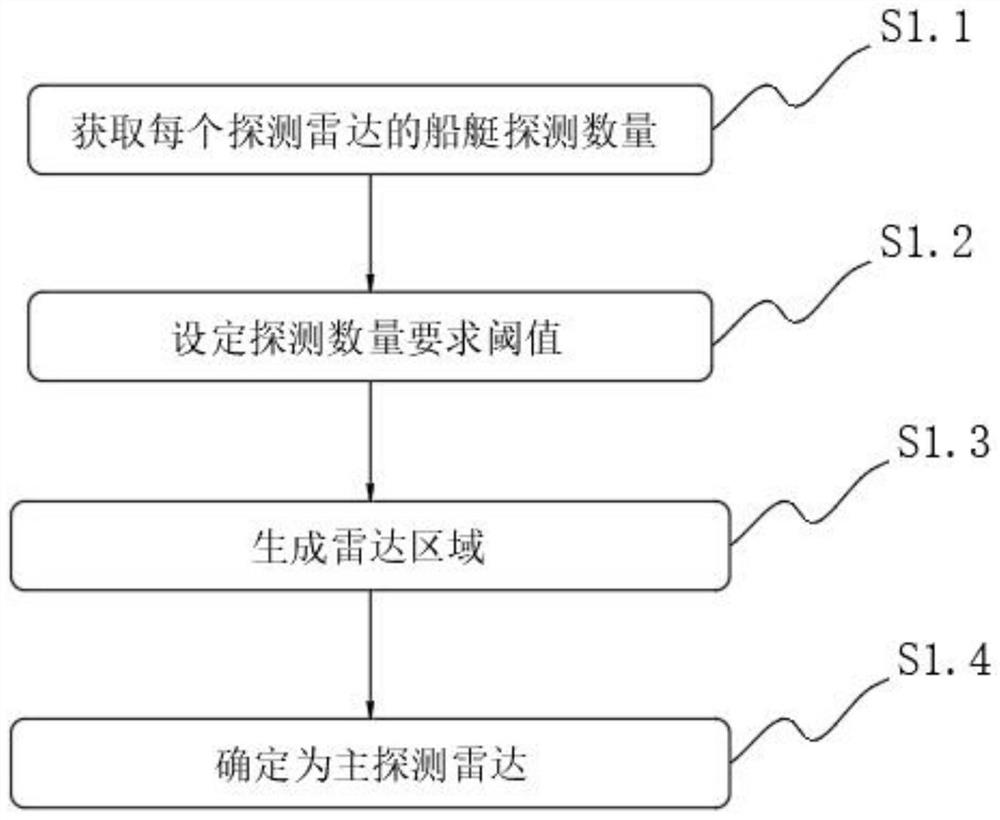
[0056] This embodiment specifically discloses a method for determining the main detection radar, please refer to figure 2 As shown, the determination of the main detection radar in S1 adopts a multi-level determination method, and the method steps are as follows:
[0057] S1.1. Obtain the number of ships detected by each detection radar;
[0058] S1.2. Set the required threshold for the number of detections, and obtain the detection radars within the required threshold;
[0059] S1.3. Generate a radar area according to the detection radar within the required threshold;
[0060] S1.4. Determine the detection radar located in the central radar area as the main detection radar.
[0061] working principle:
[0062] see Figure 5As shown, boats A-5, B1-4, B2-4, B3-4, B4-2, B5-2, B6-4, B7-4, B8-4, B9-2, B10-2, and then calculate the required threshold value using the algorithm formula of the ship's surrounding capacity. The expression is as follows:
[0063]
[0064] Among...
Embodiment 3
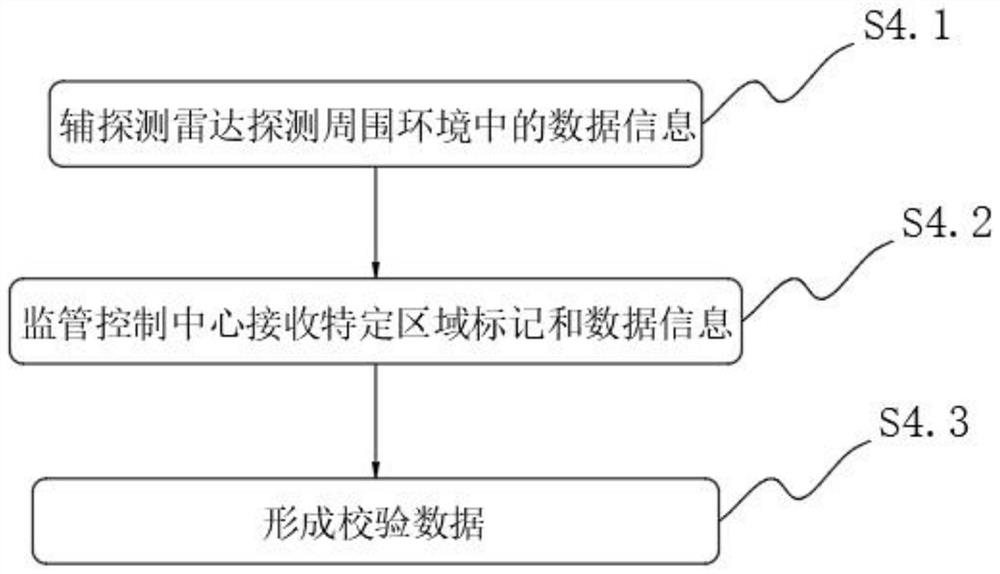
[0069] see image 3 As shown, the data information return in S4 adopts the regional return method, and the method steps are as follows:
[0070] S4.1. The auxiliary detection radar detects the data information in the surrounding environment and forms a specific area marker;
[0071] S4.2. The supervision and control center receives the specific area mark and data information returned, specifically:
[0072] The feature area marker is formed according to the feature points in the detection process of the auxiliary detection radar. Specifically, the feature point fitting algorithm is used. The algorithm formula is as follows:
[0073]
[0074] Among them, RMS is the feature point fitting value; H(s i ) is the real response; is the fitted response;
[0075] S4.3, the data information of the overlapped marks of the specific area is formed into the verification data.
[0076] It is worth noting that the verification of the returned data information in S5 includes manual ve...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More