

Non-cooperative topology inference method based on unknown node position
A node location, non-cooperative technology, applied in the direction of advanced technology, climate sustainability, sustainable communication technology, etc., can solve problems such as the situation where the node location is unknown
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
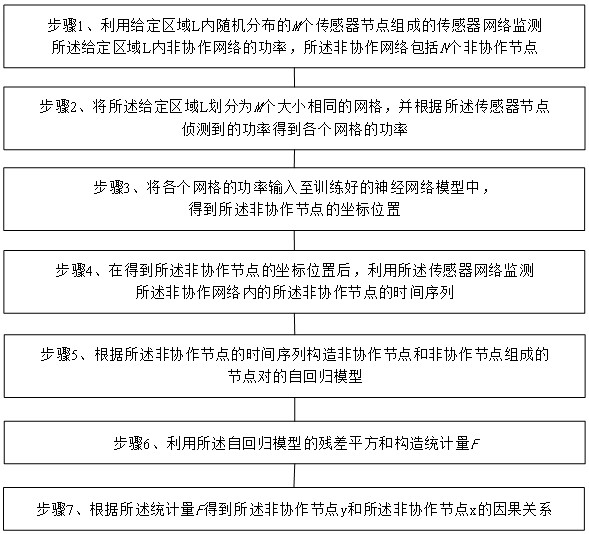
[0053] See figure 1 , figure 1 A schematic flowchart of a non-cooperative topology inference method based on an unknown node location provided by an embodiment of the present invention, the present invention provides a non-cooperative topology inference method based on an unknown node location, and the non-cooperative topology inference method includes steps 1 - Step 7, where:
[0054] Step 1. Use random distribution in a given area L A sensor network consisting of 4 sensor nodes monitors the power of a non-cooperative network in a given area L, and the non-cooperative network includes non-cooperative nodes.
[0055] In a specific embodiment, step 1 may specifically include step 1.1-step 1.2, wherein:
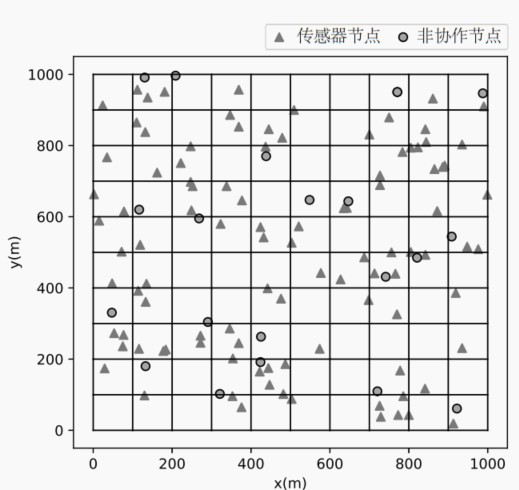
[0056] Step 1.1, randomly set in a given area L sensor nodes, where the locations of the sensor nodes are known.
[0057] Specifically, see figure 2 , a schematic diagram of a non-cooperative network including sensor nodes provided by an embodiment of the present inv...
Embodiment 2
[0112] Yet another aspect of the present invention provides an electronic device, including a memory and a processor, where a computer program is stored in the memory, and when the processor invokes the computer program in the memory, any one of the foregoing embodiments is implemented The steps of the non-cooperative topology inference method based on unknown node locations.
[0113] In the description of the invention, the terms "first" and "second" are only used for the purpose of description, and cannot be understood as indicating or implying relative importance or implying the number of indicated technical features. Thus, a feature defined as "first" or "second" may expressly or implicitly include one or more of that feature. In the description of the present invention, "plurality" means two or more, unless otherwise expressly and specifically defined.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More