Unmanned service robot based on 5G communication
A service robot and unmanned driving technology, applied in the field of unmanned service robots, can solve the problems of dust accumulation in the corner area, affecting indoor cleanliness, and cleaning omissions, so as to avoid cleaning omissions, improve cleaning effect, and expand cleaning scope Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
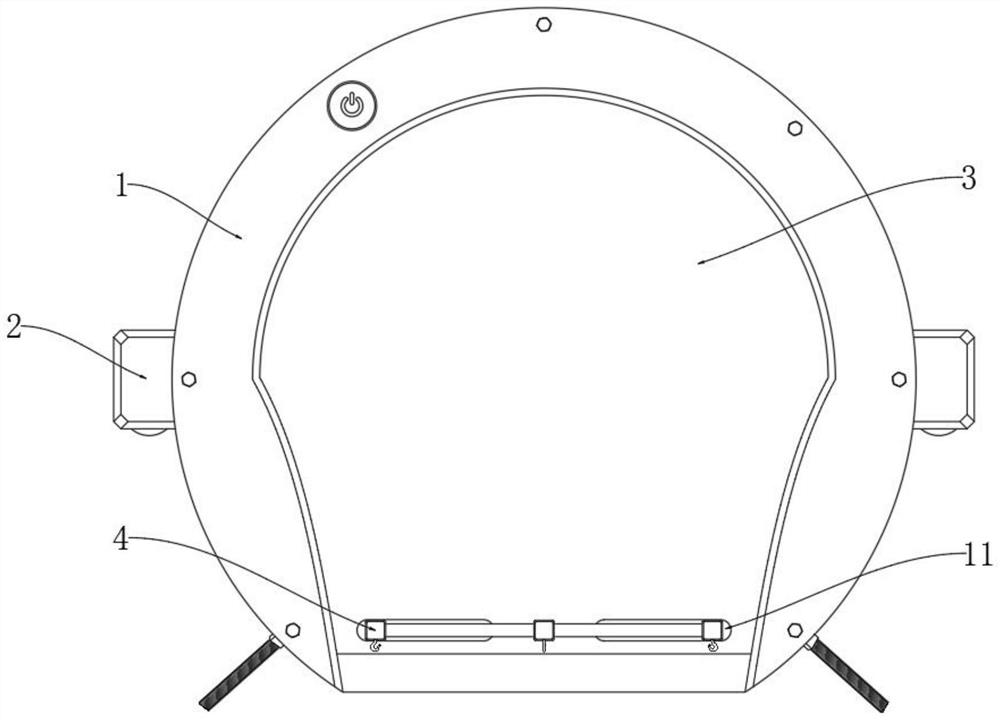
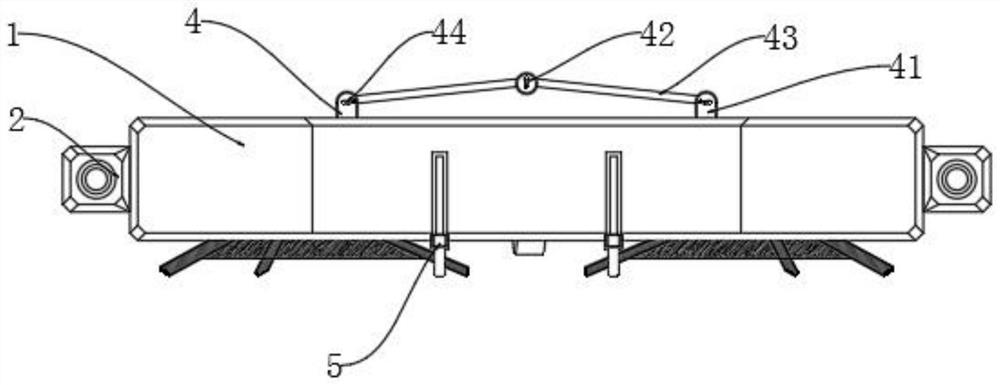
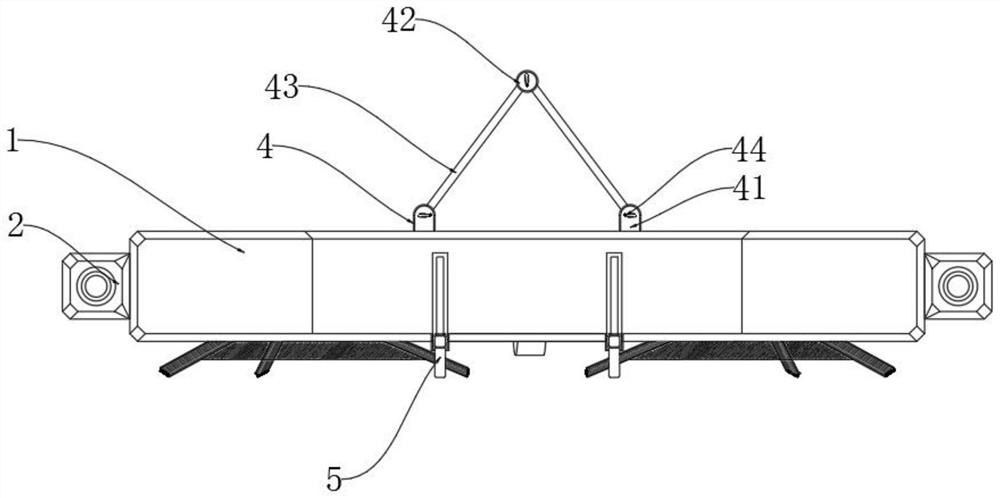
[0030] like Figure 1 to Figure 10 As shown in the figure, an unmanned service robot based on 5G communication includes a robot body 1, the bottom of the robot body 1 is provided with a sliding groove 12, and the sliding groove 12 is slidably provided with a cleaning member 5, and the cleaning member 5 includes an outer rod 51 and a Cleaning rod 53, the outer rod 51 is movably connected with the cleaning rod 53, the surface of the cleaning rod 53 is provided with bristles, the outer rod 51 is connected with the inner wall of the sliding groove 12 through the first elastic member 52, and the outer rod 51 is along the groove direction of the sliding groove 12. Sliding, the cleaning member 5 is also connected with a traction rope 54, the inside of the robot body 1 is rotated and installed with a winding tube 55, the traction rope 54 is wound on the winding tube 55, and a driving rod 56 is sleeved inside the winding tube 55. The inside of the main body 1 is also provided with a dr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More