

Robot telescopic swing mechanism and bionic robot
A bionic robot, stretching and swinging technology, applied in the field of bionic robots, can solve the problem of small application range, achieve the effect of wide application range and extended grasping distance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
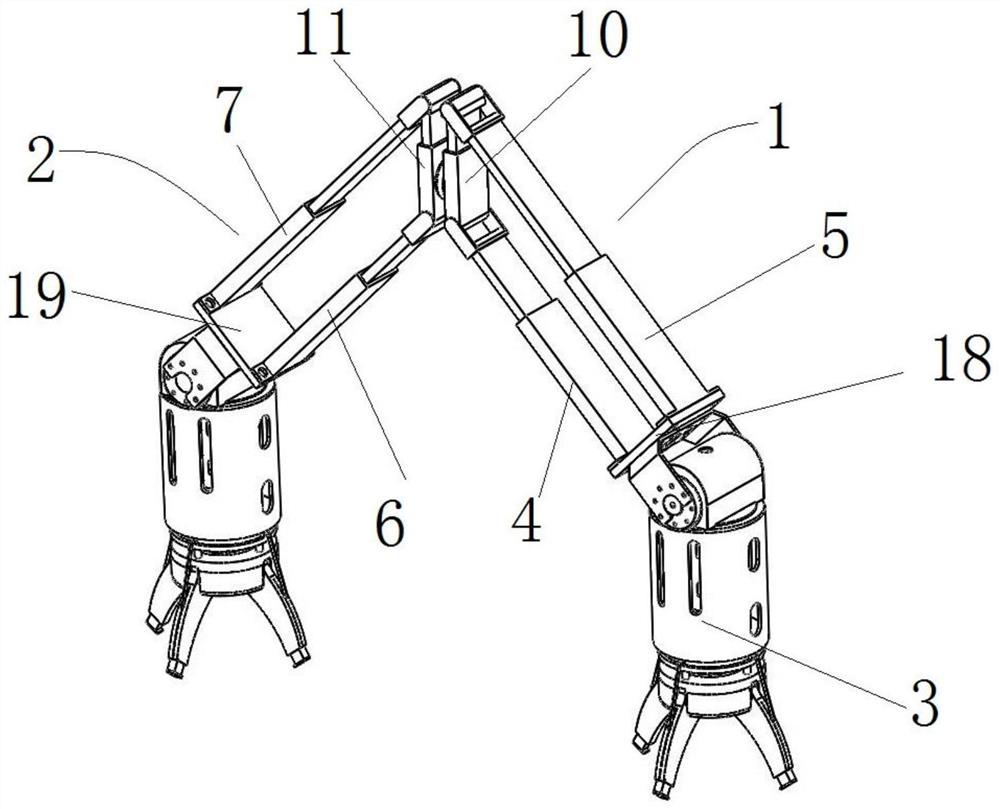
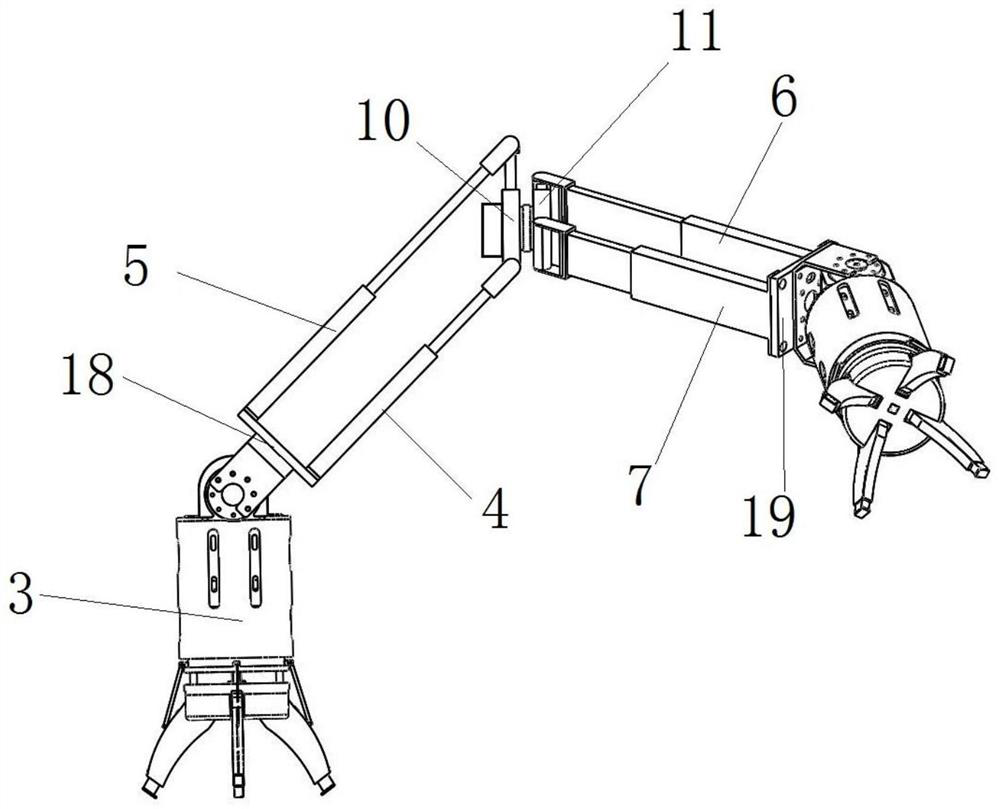
[0049] like Figure 1 to Figure 2 As shown, the bionic robot includes a first telescopic arm 1 and a second telescopic arm 2 that are rotatably assembled together. Both the first telescopic arm 1 and the second telescopic arm 2 include a drive telescopic rod that can be extended and retracted along the extension direction of the telescopic arm. The telescopic rods in the respective telescopic arms can be driven to extend and retract, not only can the distance of the telescopic arms be extended, but also the angle of the telescopic arms can be changed. By driving the expansion and contraction of the telescopic rod to cooperate with the swing of the two telescopic arms, the movement of the bionic robot with multiple postures is realized, so that the bionic robot in the present invention is suitable for various application scenarios. Wherein, each driving telescopic rod in the two telescopic arms is equipped with a telescopic driving mechanism, so that the telescopic driving of e...
specific Embodiment 2
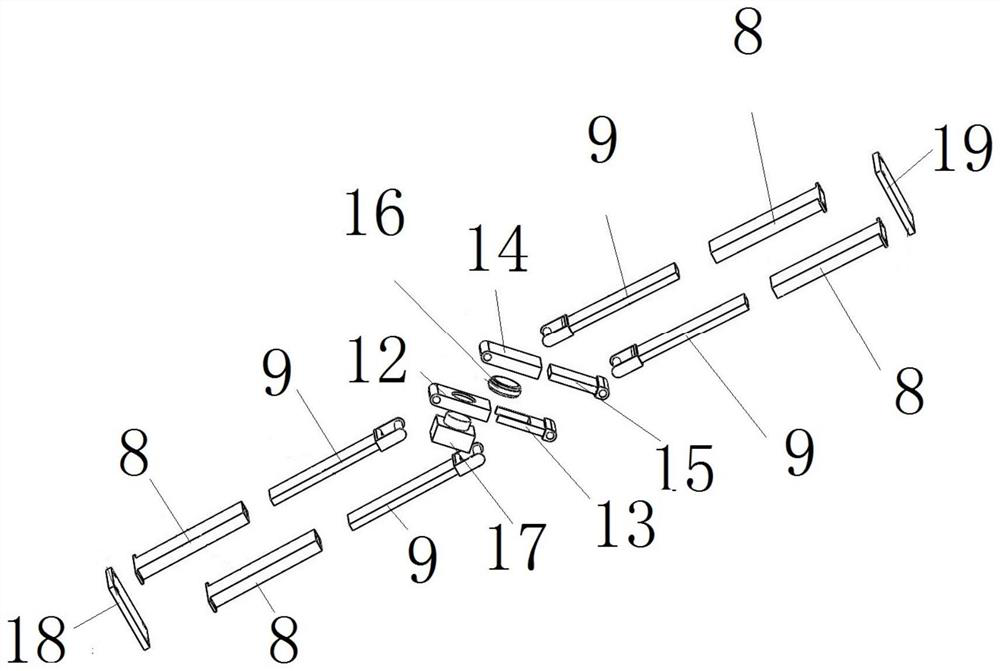
[0061] The difference from Embodiment 1 is that in Embodiment 1, the rotating joint 16 is a cylindrical fitting structure. In this embodiment, the rotary joint includes bearings provided on the first connecting rod and the third connecting rod. Turn assembly.
specific Embodiment 3
[0063] The difference from Embodiment 1 is that in Embodiment 1, the cross-sections of the fixed rod 8 and the movable rod 9 are both rectangular, so that the fixed rod 8 and the movable rod 9 are guided to slide and prevent rotation. In this embodiment, the sections of the fixed rod and the movable rod are triangular. In other embodiments, the anti-rotation structure of other shapes such as pentagon and hexagon may also be used. In other different embodiments, the fixed rod and the movable rod are not required to stop rotation, and the fixed rod and the movable rod in this case may be cylindrical rods.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More