Bionic passive multi-degree-of-freedom ankle joint prosthesis
An ankle joint and degree of freedom technology, which is applied in the direction of ankle joints, joint implants, joint implants, etc., can solve the problems of unsatisfactory use effect and inflexibility, and achieve good use effect and good activity flexibility Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The technical solutions of the present invention are described below in conjunction with the accompanying drawings:
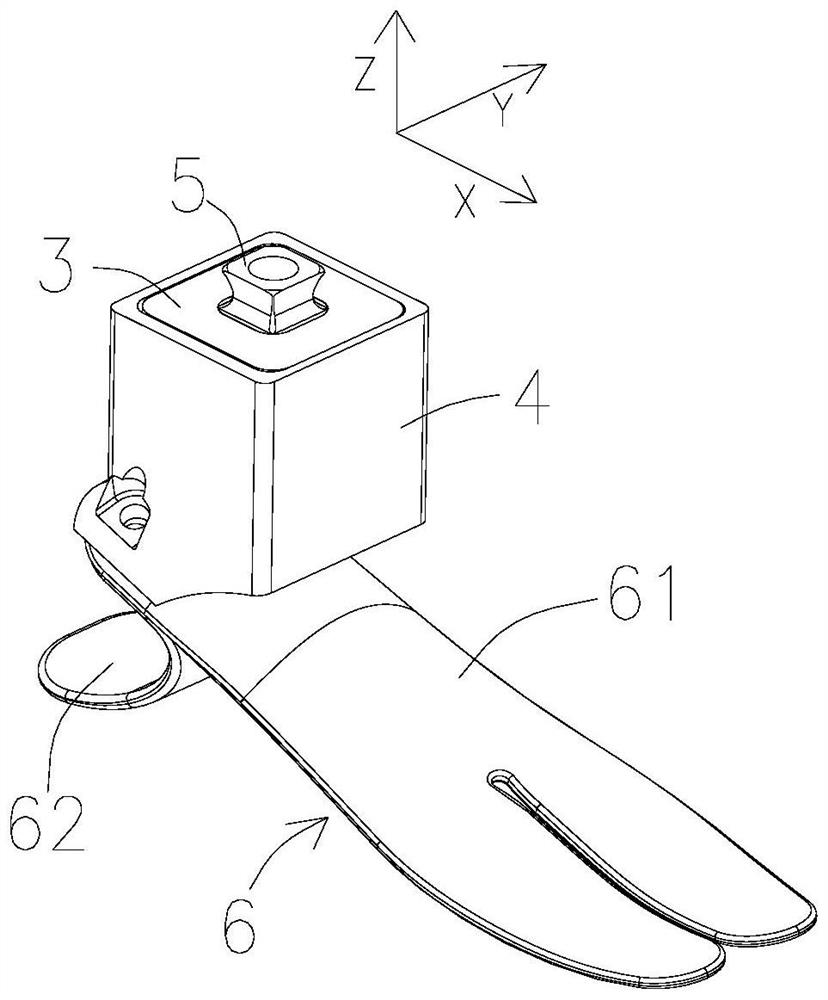
[0028] In the drawings, the plane formed by the X axis and the Z axis of the axis coordinates is the sagittal plane, the plane formed by the X axis and the Y axis is the horizontal plane, and the plane formed by the X axis and the Y axis is the coronal plane.
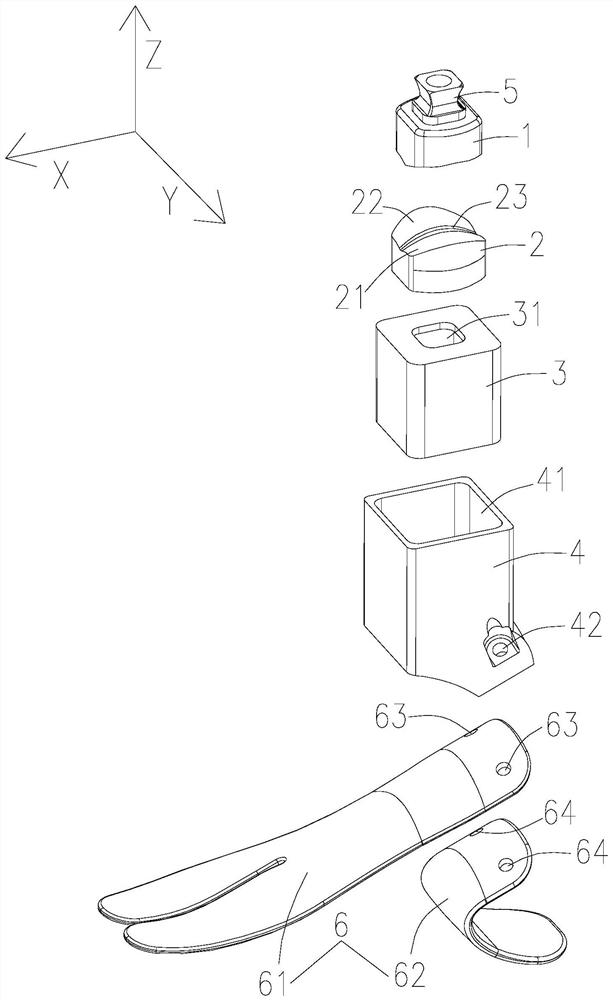
[0029] The bionic passive multi-degree-of-freedom ankle joint prosthesis of the present invention includes:
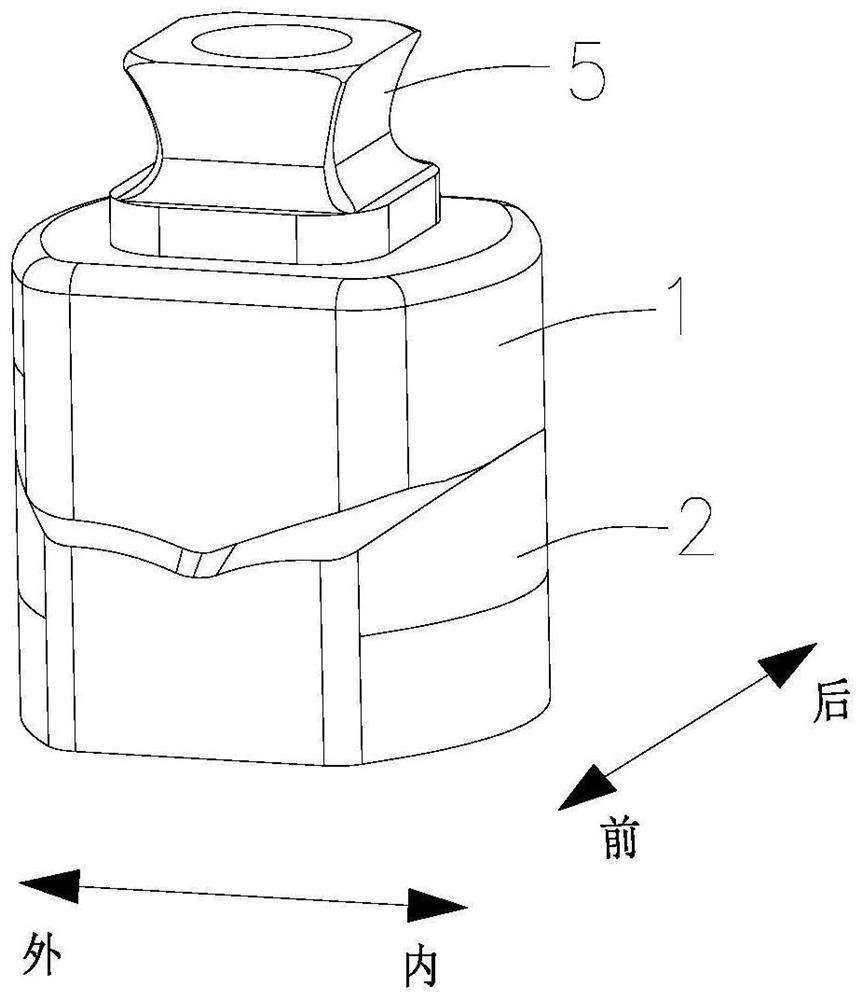
[0030] see Figure 1 to Figure 5 , the movable seat 1 on the ankle, the top is provided with the top of the foot connecting member 5, the bottom is provided with a medial socket 11 located on the inside, a lateral socket 12 located on the outside, and a socket located between the medial socket 11 and the lateral socket 12. The intercondylar spine 13, the foot top connecting member 5 is used to connect the amputation site of the user.
[0031] Ankle lower movable seat 2, the top is provid...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com