

Control device and control method for robot
A control device and control method technology, applied in the field of robotics, can solve problems such as difficulties, inability to be monitored by robots, and difficulty in locating the cause of abnormalities or failures
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] Best Mode for Carrying Out the Invention
[0036] Referring to the accompanying drawings, a robot using a control device according to the present invention and a control method thereof will be described in detail below.
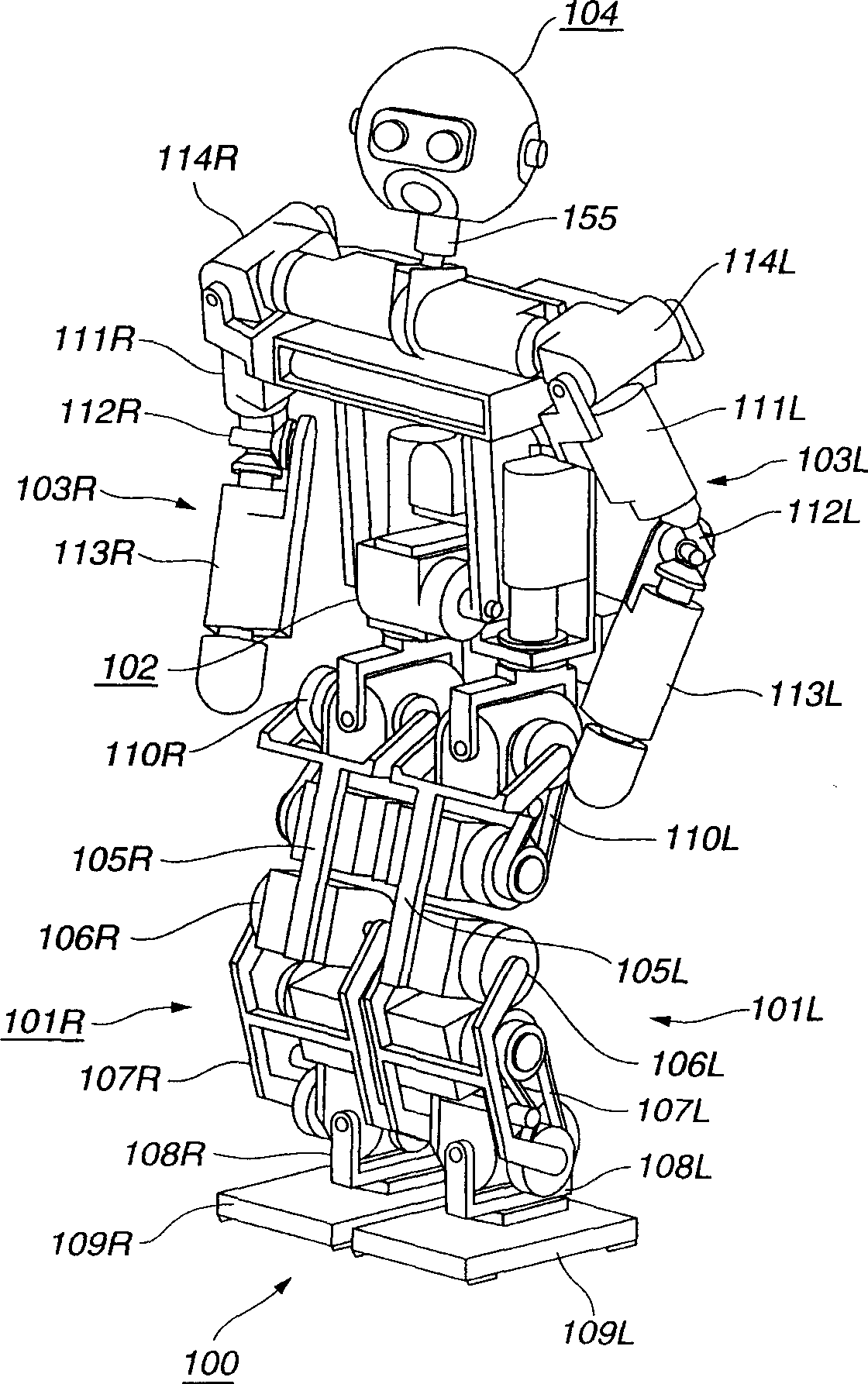
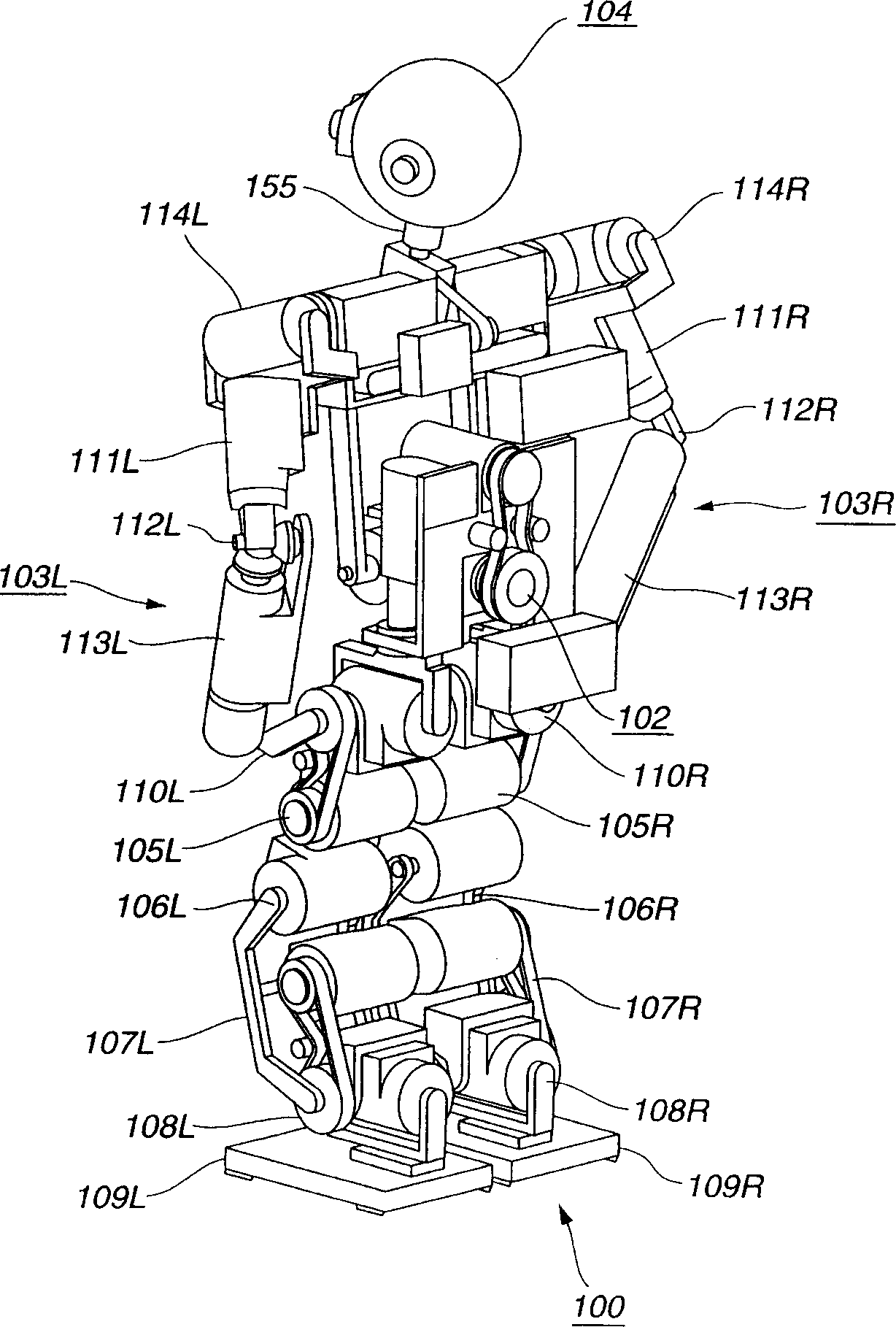
[0037]1 and 2 show the legged mobile robot 100 in an upright state when the robot of the present invention is viewed from the front and rear, respectively. The legged mobile robot 100 is of the so-called "human-like" type and can be set up with a behavioral plan based on voice or video input through a dialogue with the user, or autonomously without resources related to user input, that is, independently of Users, these will be described in turn later. As shown in FIGS. 1 and 2 , the legged mobile robot 100 includes two lower limbs 101R, 101L responsible for moving the legs, a trunk 102 , right and left upper limbs 103R, 103L, and a head 104 .
[0038] The left and right lower limbs 101R, 101L are composed of thighs 105R, 105L, kn...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More