

Variant structure leg wheeled exploration robot
A variable structure, robot technology, applied in the field of detection robots, can solve the problems of slow motion control and poor adaptability, and achieve the effects of increasing stability, fast traveling speed, and reducing volume
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
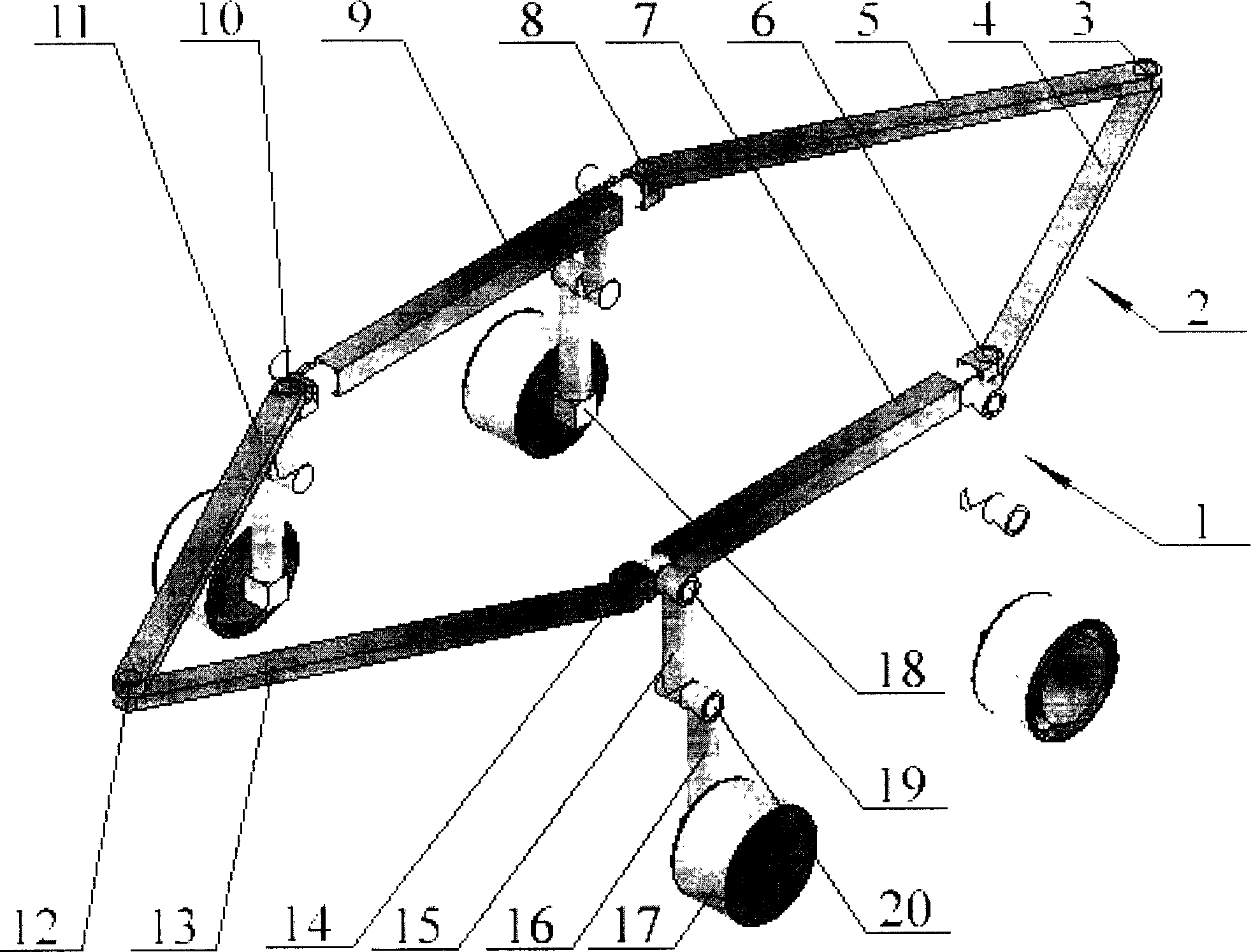
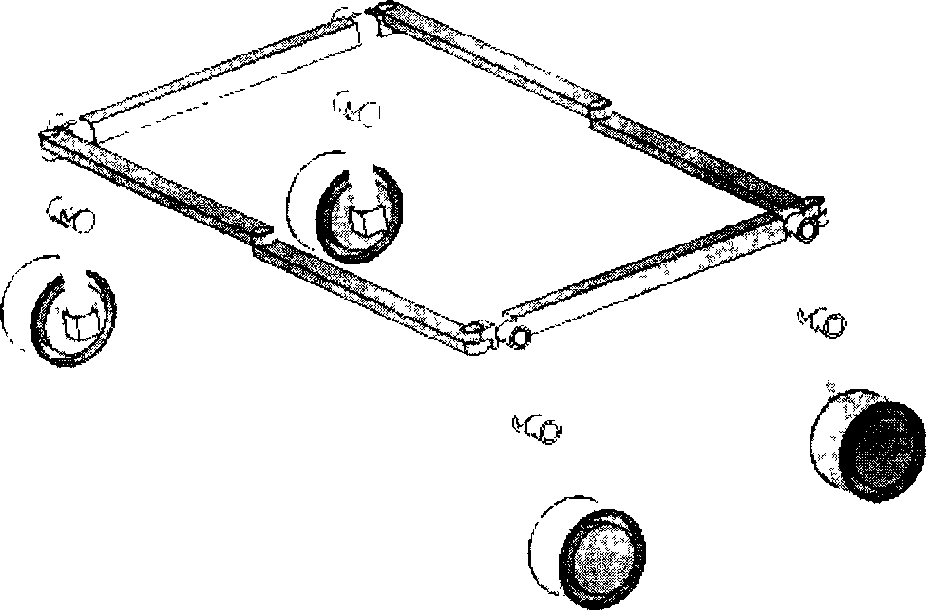
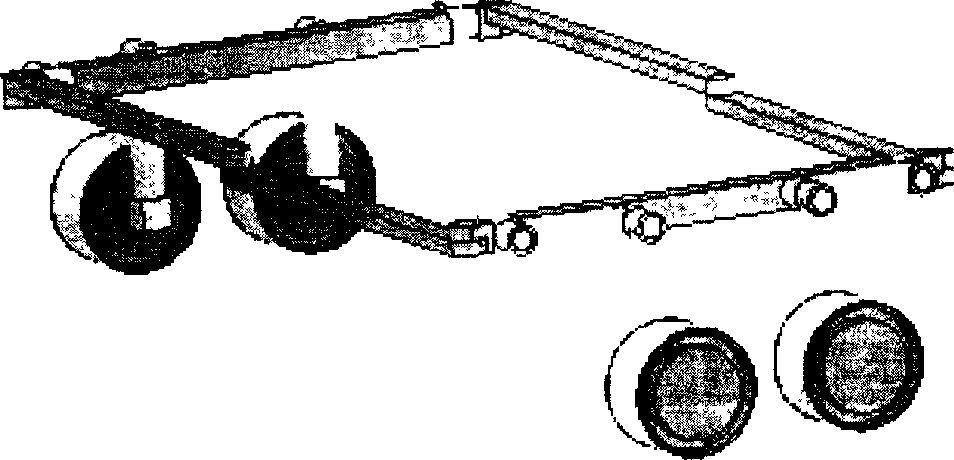
[0052] figure 1Shown is an embodiment of the variable-structure leg-wheeled detection robot of the present invention. The detection robot includes a vehicle body and a traveling mechanism. Corresponding rods on two opposite sides are parallel to each other, and the rods are connected sequentially through hinges. Wherein the rod 7 and the corresponding rod 9 are equal in length. All the other 4 bars, namely bar 4, bar 5, bar 11 and bar 13 are equal in length. The angle values at the joints are changed by driving the motors installed at the joints 3 and 12. The joints 3 and 12 are used as two fulcrums for the deformation of the parallelepiped structure. By changing the angles of the connection points of the bars, the structure of the vehicle body is controlled to make the vehicle body 2 wider or narrower. During the deformation of the body, the angl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More