Femur center location method based on hand eye type robot
A robot and femur technology, applied in surgery, medical science, etc., can solve the problem of large positioning error of the femoral center, and achieve the effect of improving accuracy, low complexity, and simple steps
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0015] In order to better understand the technical solutions of the present invention, a further detailed description will be made below in conjunction with the accompanying drawings and embodiments.
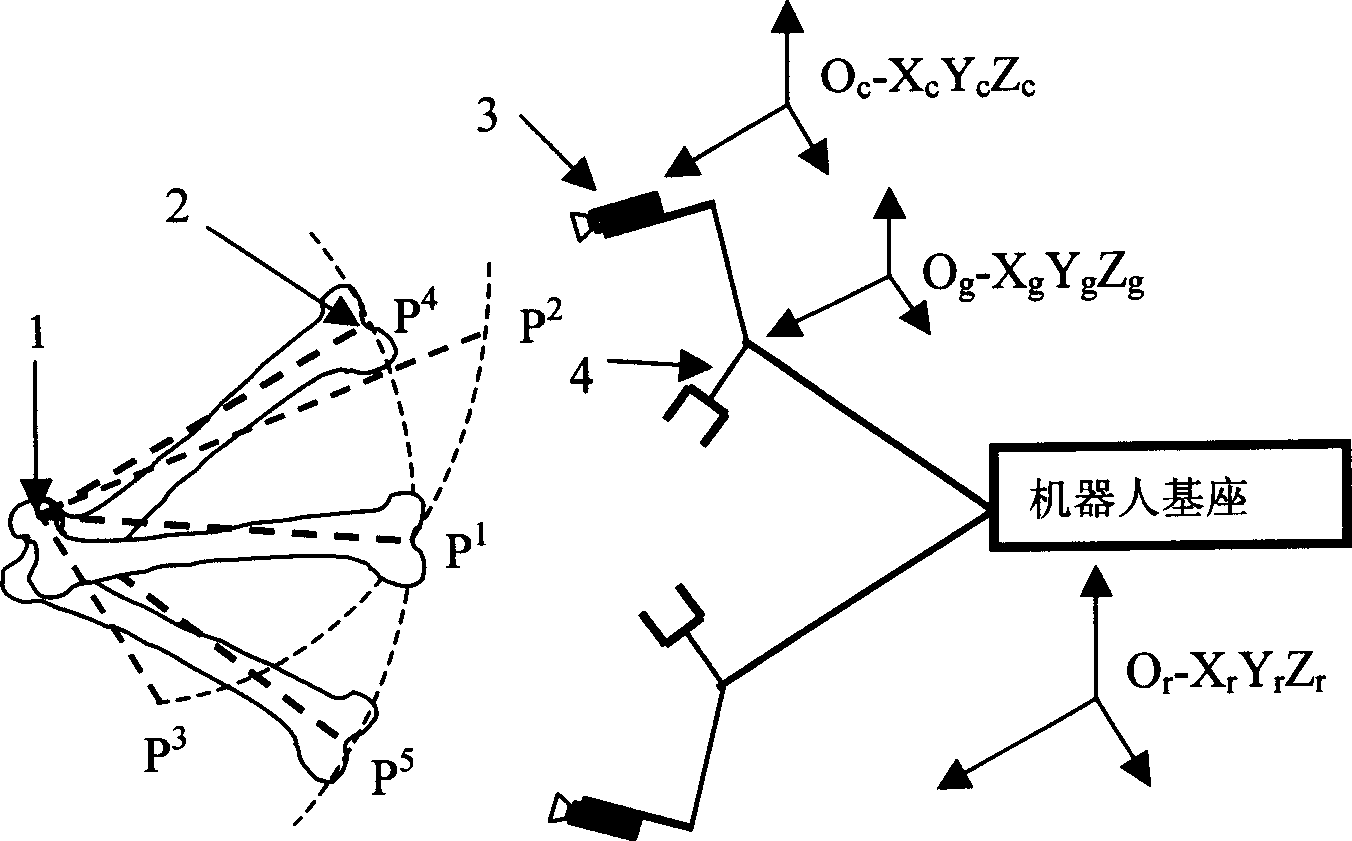
[0016] 1. Use Tsai's method to calibrate the hand-eye robot, and obtain the robot's hand-eye position transformation relationship, that is, the rotation matrix and translation vector between the robot's claw coordinate system and the camera coordinate system. Let the rotation matrix and translation vector of the camera coordinate system obtained by calibration relative to the paw coordinate system be R cg and
[0017] 2. Collect the coordinates of the center of the intercondylar notch and the data of the paw posture. Fix the upper body and hip of the patient to keep the center of the femur unchanged, and the distal part of the femur is exposed. Bend the knee 90 degrees forward, and record the position of the distal end of the femur as the initial position P 1 , move the cla...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap