

Positioning method for manned submersible without fixed reference point
A manned submersible and inertial coordinate system technology, which is applied in the field of manned submersible positioning in the ocean, can solve the problems of fixed underwater acoustic beacons such as troublesome tracking range, and achieve the effect of avoiding the loss of underwater acoustic beacons.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0026] The present invention will be further described below.
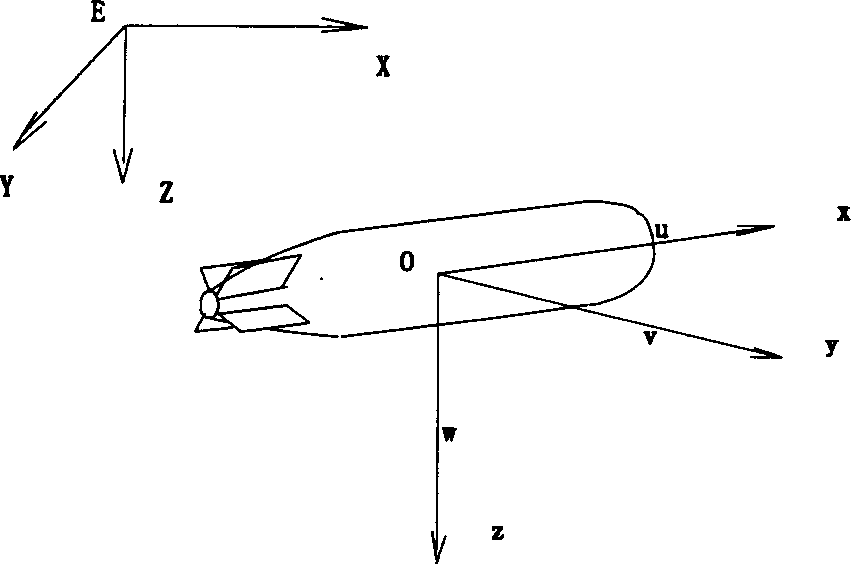
[0027] The invention adopts the ultra-short baseline positioning system to determine the coordinates of the manned submersible in the inertial coordinate system, without dropping fixed underwater acoustic beacons on the sea surface or sea bottom. specifically is:
[0028] First of all, a fixed coordinate system (E-XYZ) must be determined, and the origin is E. Wherein, EZ points to the center of the earth, and the horizontal plane adopts the northeast coordinate system. In this embodiment, the mother ship is taken as the origin E of the fixed coordinate system. In addition, the dynamic coordinate system (o-xyz) must be defined, and the dynamic coordinate system is fixedly connected with the manned submersible. Such as figure 1 As shown, in principle, the origin of the moving coordinate system and the direction of the coordinate axes can be selected arbitrarily. For the sake of convenience, in this embodiment, th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More