

Variable-structure leg wheel type machine insect
A technology of variable structure and robotic insects, which is applied in the field of detection robots, can solve the problems of slow movement of detection robots, poor adaptability to complex landforms, and reduced adaptability to complex environments, so as to increase stability, facilitate transportation and storage, and facilitate transportation and stored effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
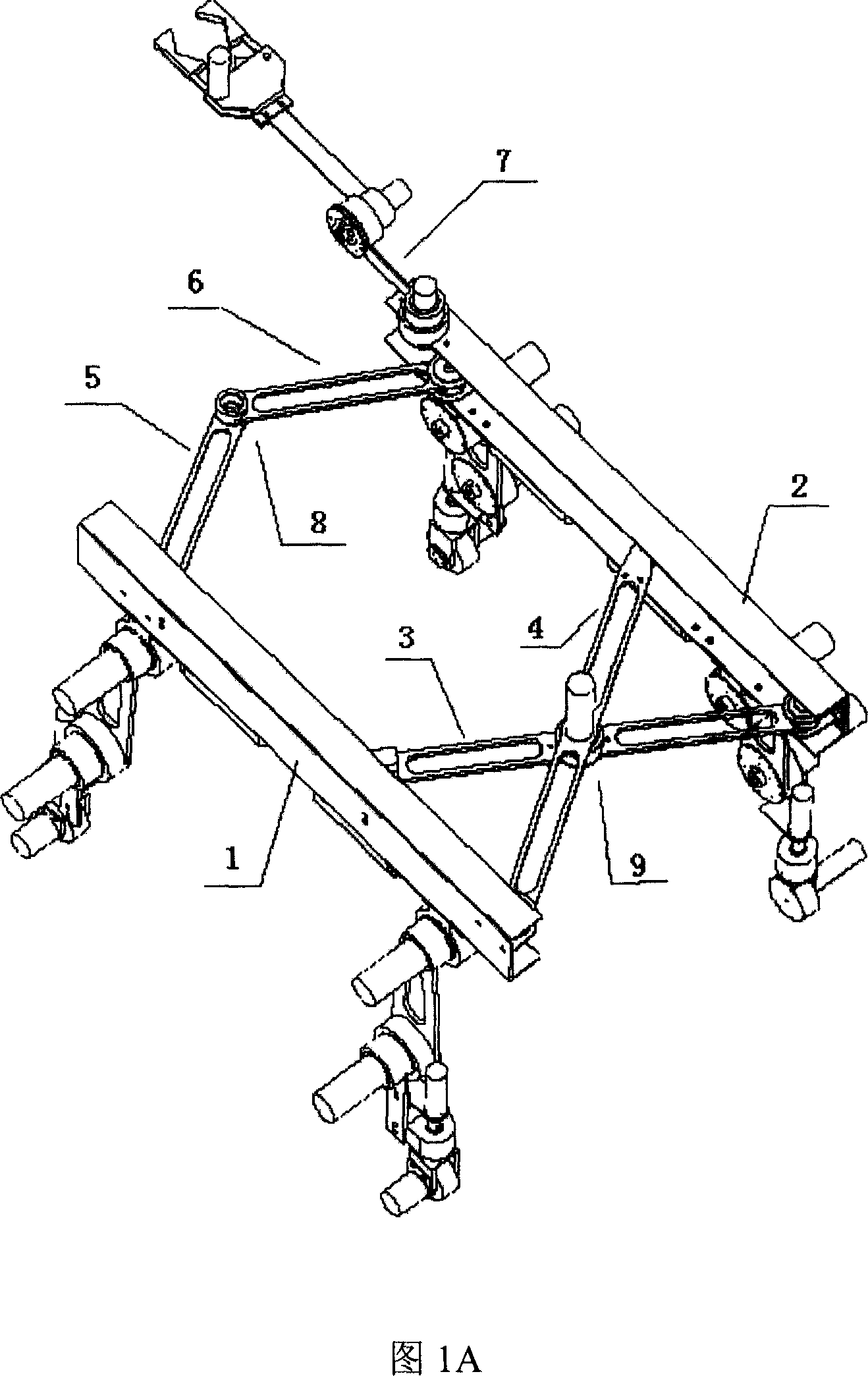
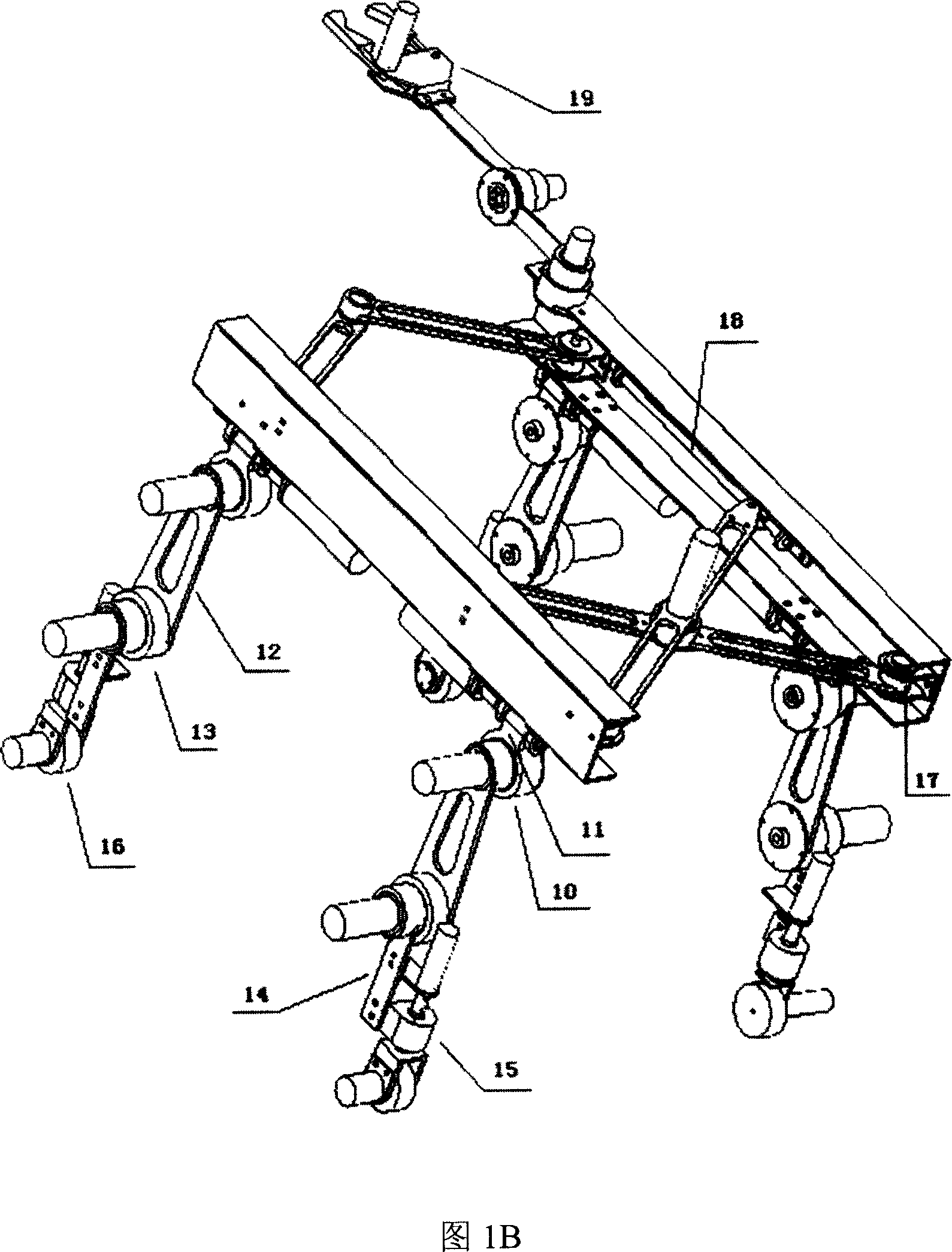
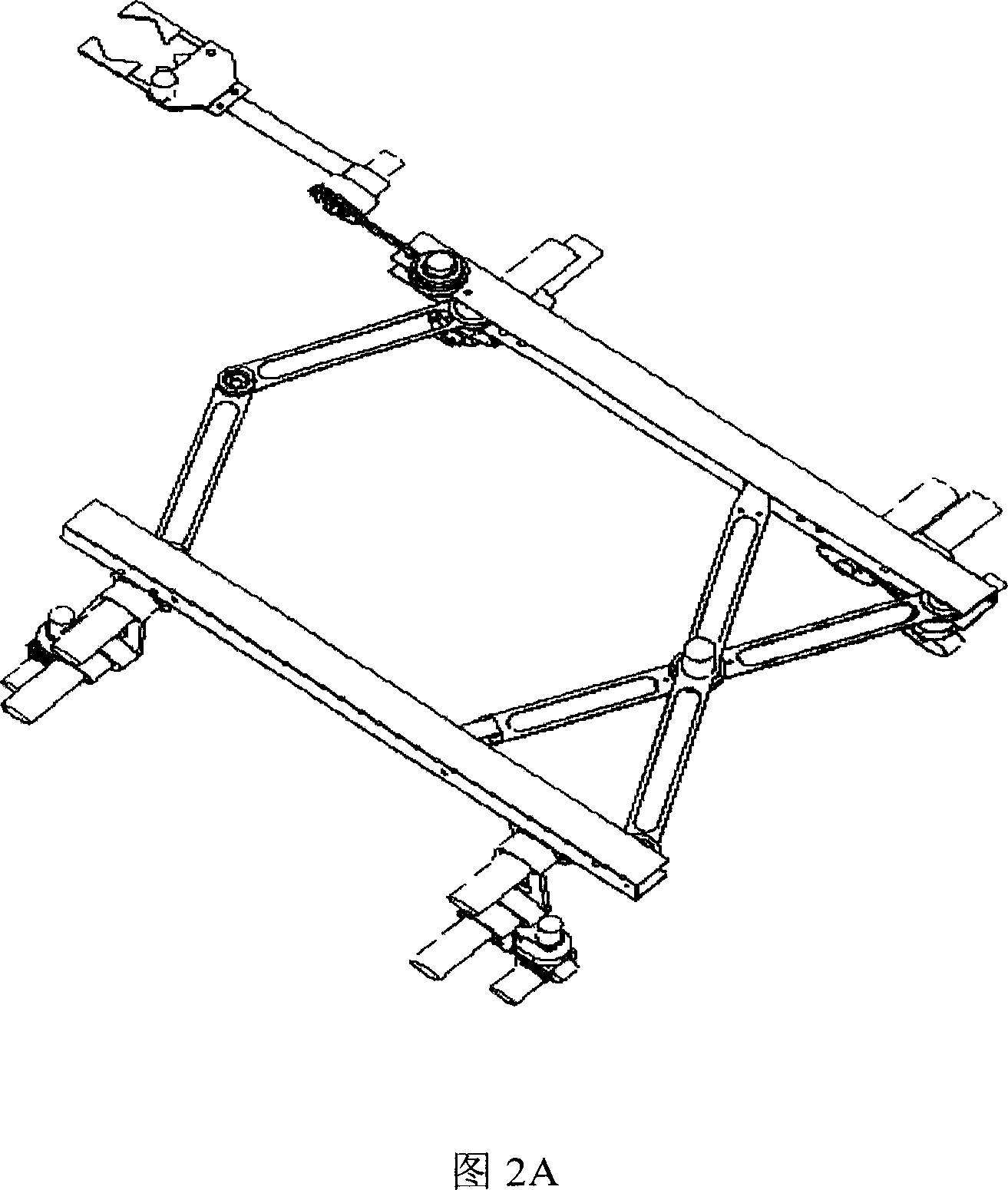
[0033] With reference to Fig. 1A, shown in 1B, it is an embodiment of the variable-structure leg-wheeled detecting robot of the present invention, and this robotic worm includes vehicle body and driving mechanism, and in this embodiment, the vehicle body is a docking congruence with a deformable bottom edge parallel Triangular structure, composed of left and right car bodies and four rods, in which rod 3 and rod 4 form a cross structure, and the middle is connected by a hinge; rod 5 and rod 6 (auxiliary support, increasing the rigidity and strength of the car body) and left and right The car body is sequentially connected by hinges to realize flexible connection. Wherein the rod 3 is equal to the length of the rod 4, and the length of the rod 5 is equal to that of the rod 6. The motor installed at the joint 9 is driven to change the angle value at the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More