

Robot for multiple posture exoskeleton lower limb rehabilitation training
A rehabilitation training and exoskeleton technology, applied in gymnastics equipment, manipulators, passive exercise equipment, etc., can solve the problems of insufficient positioning accuracy, failure to meet the needs of patients' rehabilitation training, and failure to achieve rehabilitation effects, etc., to achieve the best The effect of rehabilitation exercises
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention is illustrated below in conjunction with accompanying drawing.
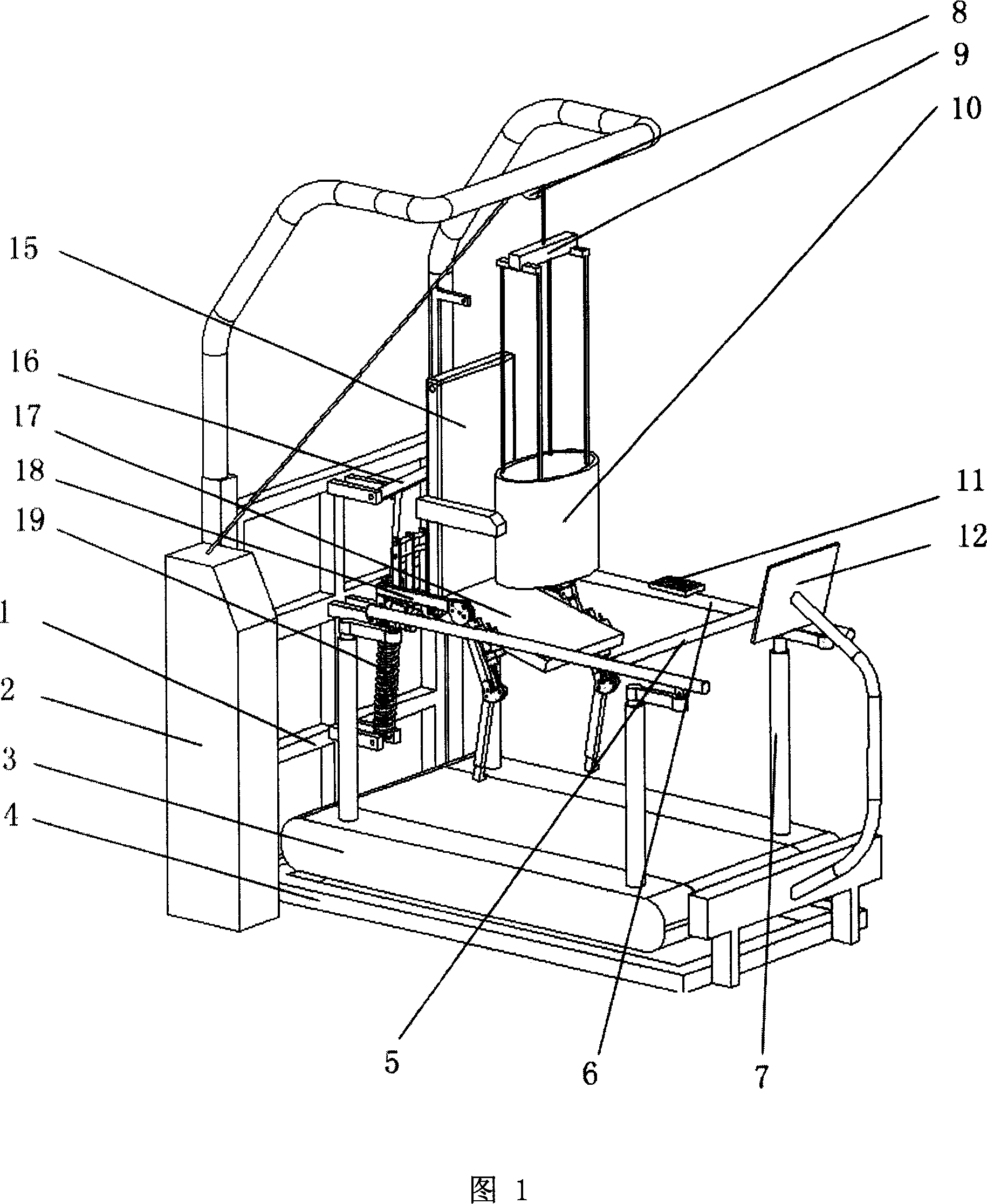
[0017] Referring to Figure 1, the multi-position exoskeleton lower limb rehabilitation training robot includes a base, a guardrail, a suspension system, an exoskeleton training device and a computer control system;
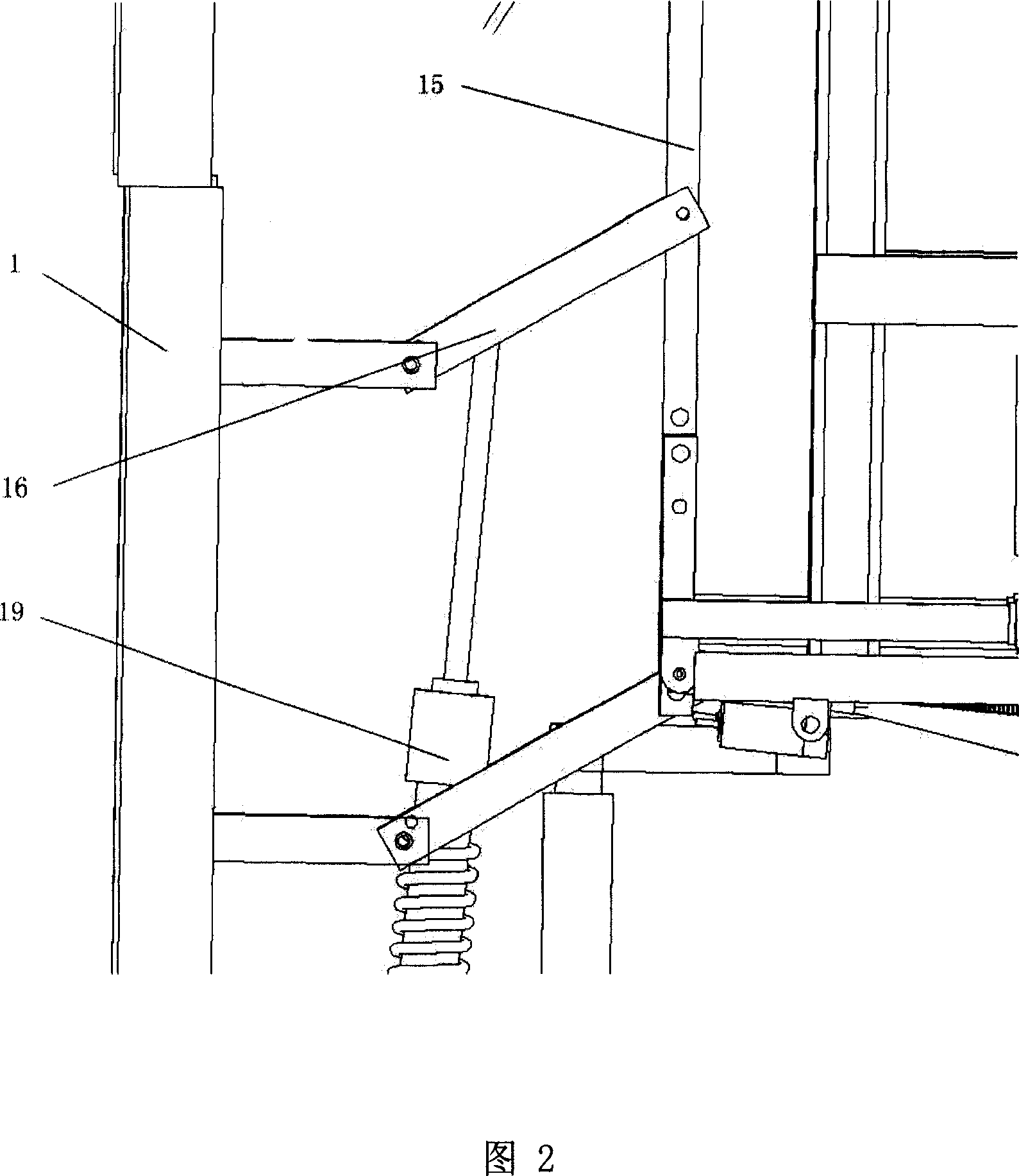
[0018] Frame: including the chassis 4 that carries the whole machine, the treadmill 3 and the support 1, the treadmill 3 is placed on the chassis 4, and the support 1 is fixed on the rear end of the chassis 4;
[0019] Guardrail: composed of upright bar 7, cross bar 6 and handrail 5, installed on the static seat of treadmill 3;
[0020] Suspension system: including a load-bearing camisole 10, a suspension cable 9 connected to the camisole, a counterweight 2 and a pulley 8 arranged on the support 1, the suspension cable is wound on the pulley 8, one end of the cable is connected with the suspension cable 9, and the other One end is connected with counterweight 2. The sus...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More