[0005] In view of the above insufficiencies, the present invention has been accomplished to provide an object
recognition system which is capable of determining the mask area from within a subject image [S] accurately and rapidly for reliable and easy recognition. The
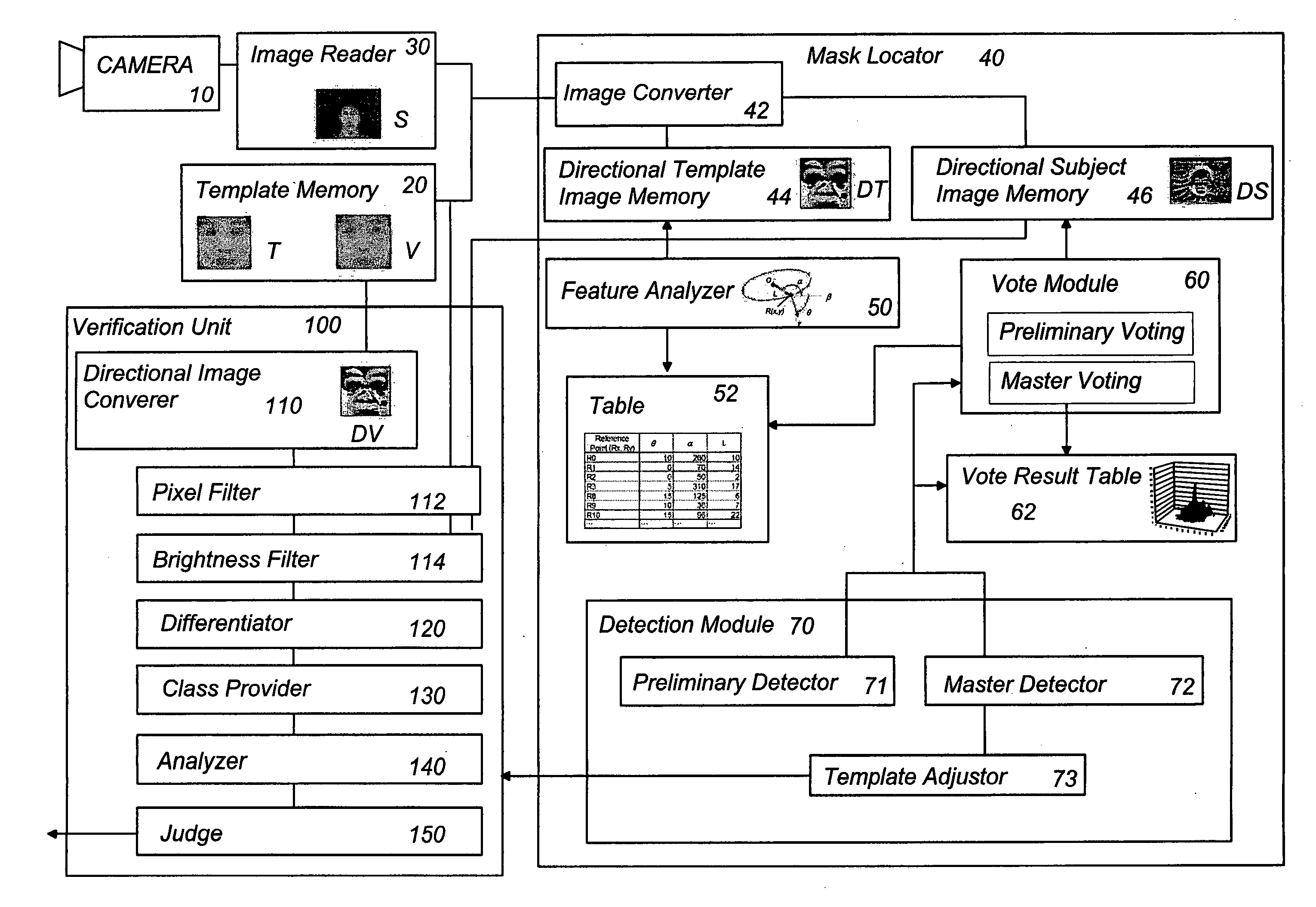
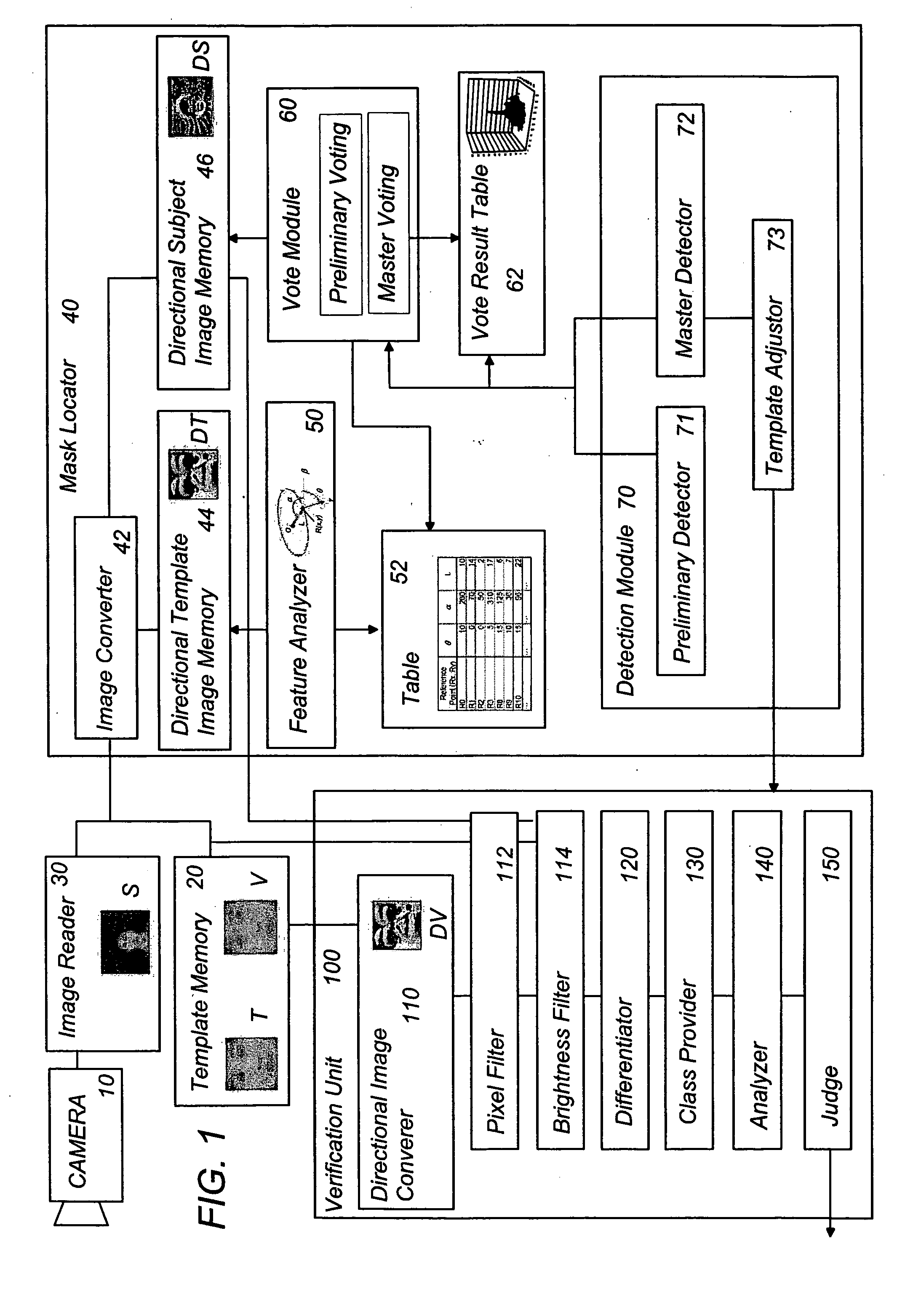
system in accordance with the present invention includes a template memory storing an image size template [T], an image reader taking the subject image [S] to be verified, and a mask locator which locates, from within the subject image [S], the mask area [M] corresponding to the image size template. The mask locator is designed to have an
image converter, a feature analyzer, a table, a vote module, and a detection module.
[0013] The vote module may be configured to vary the distance (L) within a predetermined range in order to calculate a plurality of the candidates for each of the varied distances, and to make a vote on each of the candidates. The distance (L) is indicative of a size of the mask area [M] relative to the image size template [t]. In this instance, the detection module is configured to extract the varied distance from the candidate having a maximum number of the votes, thereby obtaining a size of the mask area [M] relative to the image size template M. Thus, even when the subject image [S] includes a target object which differs in size from the image size template [T], the mask locator can determine the relative size of the mask area [M] to the image size template [T], thereby extracting the mask [M] in exact correspondence to the image size template [T]. When the object recognition system is utilized in association with a security camera or an object
verification device, the relative size of the mask area thus obtained can be utilized to
zoom on the mask area for easy confirmation of the object or the human face or to make a detailed analysis on the mask for
verification of the object. Therefore, when the object
verification is made in comparison with a verification image template [V], the verification image template [V] can be easily matched with the mask area [M] based upon the relative size of the mask area.
[0015] Further, the vote module may be designed to vary the angle (α+φ) within a predetermined range in order to calculate a plurality of the candidates for each of the varied angles (α+φ), and make a vote on each of the candidates. In this instance, the detection module is designed to extract the varied angle (α+φ) from the candidate having a maximum number of the votes, thereby obtaining a rotation angle (φ) of the mask area [M] relative to the image size template [T] for matching the angle of the template with the mask area [M]. Thus, even when the subject image [S] includes an object or human face which is inclined or rotated relative to the image size template [T], the mask locator can extract the mask area [M] in correspondence to the image size template [T], and therefore give a relative rotation angle of the mask area to the image size template [T]. The relative rotation angle thus obtained can be therefore best utilized to control the associated camera to give an upright face image for easy confirmation, or to match the verification image template [V] with the mask area [M] for reliable object or human
face verification.
[0018] Further, the detection module may be designed to include a like a selector for candidates having the number of votes exceeding a predetermined vote threshold, a like mask provider setting the mask area [M] around the center defined by each of selected candidates, and a
background noise filter. The
background noise filter is configured to obtain a parameter indicative of the number of the votes given to each of the pixels selected around the candidate, and filter out the mask area [M] having the parameter exceeding a predetermined parameter threshold. Thus, it is readily possible to cancel the
background noise for reliable verification.
[0024] Further, in order to save memory data size for rapid calculation, the
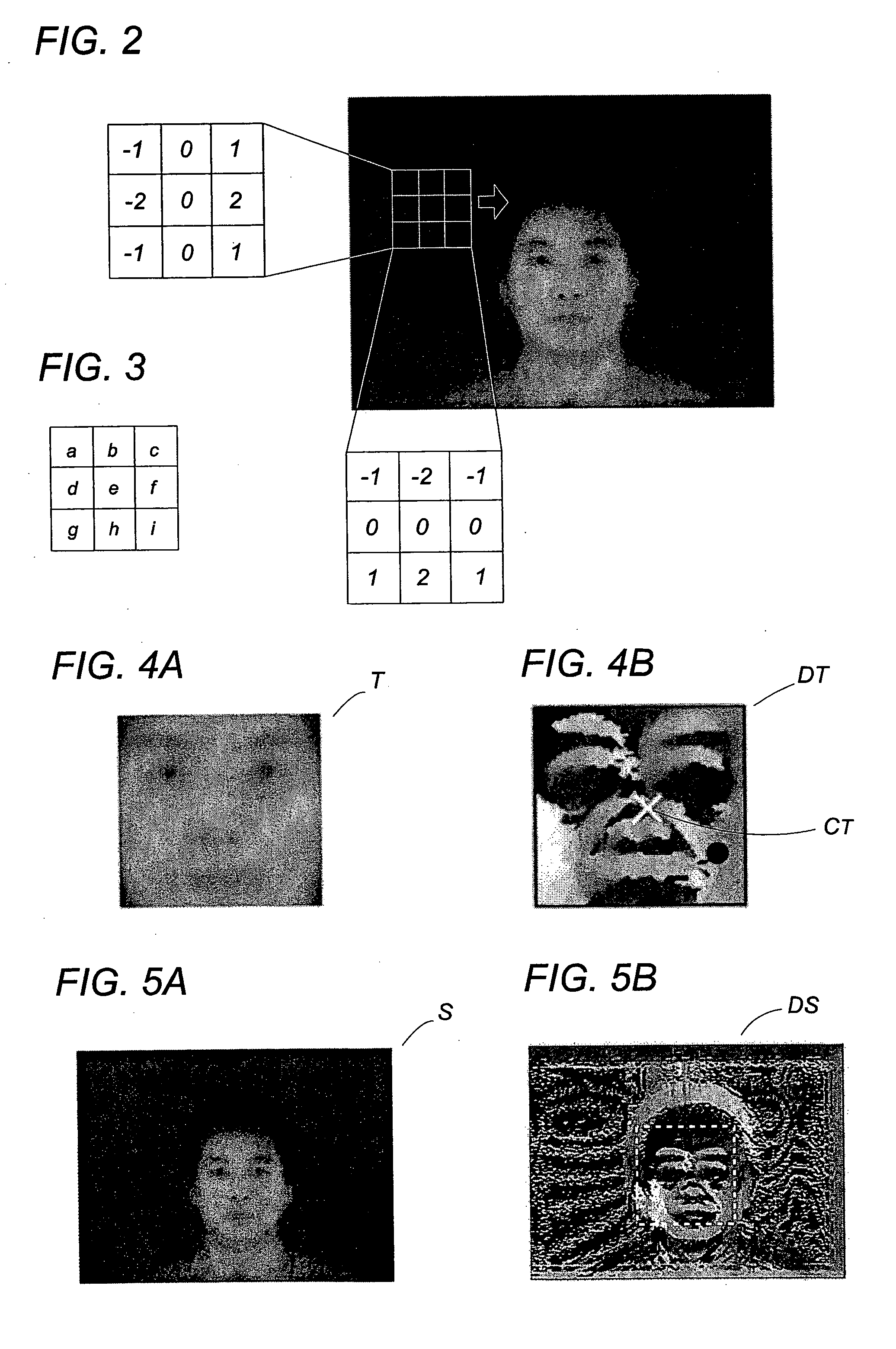
image converter may be configured to compress the density-gradient directional template image [DT] and the density-gradient directional subject image [DS] respectively into correspondingly reduced images. The compression is made by integrating two or more pixels in each of the standard images into a
single pixel in each of the reduced image by referring to an edge image obtained for each of the image size template [T] and the subject image [S]. The edge image gives a differentiation strength for each pixel which is relied upon to determine which one of the adjacent pixels is a representative one. The representative pixel is utilized to select the density gradient directional value (θT, θS) from each of the directional template and subject images [DT, DS] as representing of the adjacent pixels and is assigned to a single sub-pixel in each of the reduced images such that the reduce image can be reduced in size for saving a memory area.
[0030] The verification unit may further include a controller which is responsible for selecting one of sub-divisions each included in the mask area [M] to cover a distinctive part of the subject image, limiting the mask area [M] to the selected sub-division, and calling for the judge. The controller is configured to select another of the sub-divisions and limit the mask area [M] thereto until the judge decides the verification or until all of the sub-divisions are selected. Thus, by assigning the sub-divisions to particular distinctive portions of the object, for example, eyes,
nose, and mouth of the human face specific to the individuals, the verification can be done when any one of the sub-divisions is verified to be identical to that of the verification image, which can certainly reduce the time for verification, yet assuring reliable verification.



 Login to View More
Login to View More  Login to View More
Login to View More