

Hip and Knee Actuation Systems for Lower Limb Orthotic Devices
a technology for hip and knee joints and orthotics, applied in the field of hip and knee actuation systems for lower limb orthotics, can solve the problems of bulky devices and burdensome manipulation, and achieve the effect of increasing the range of motion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
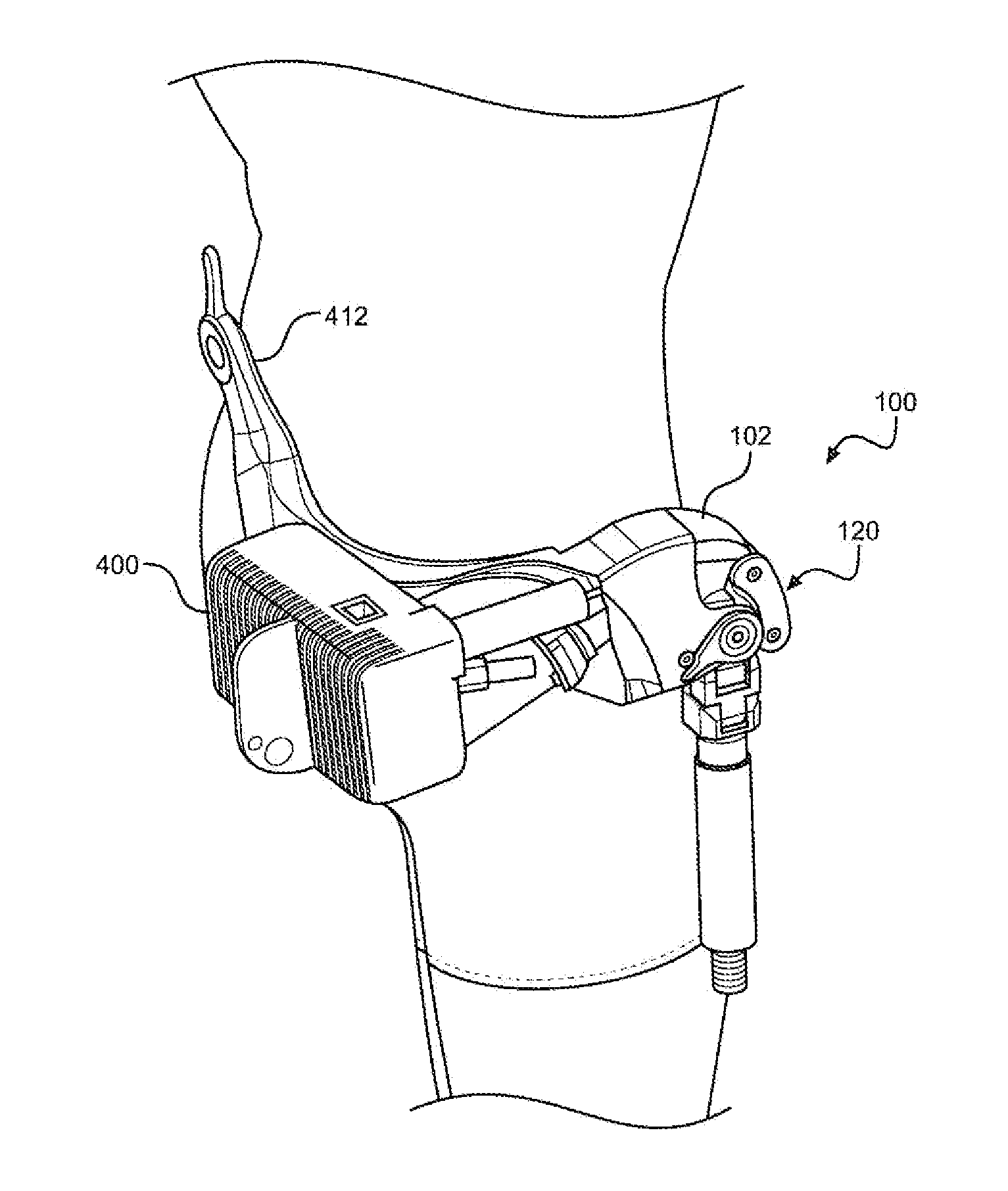
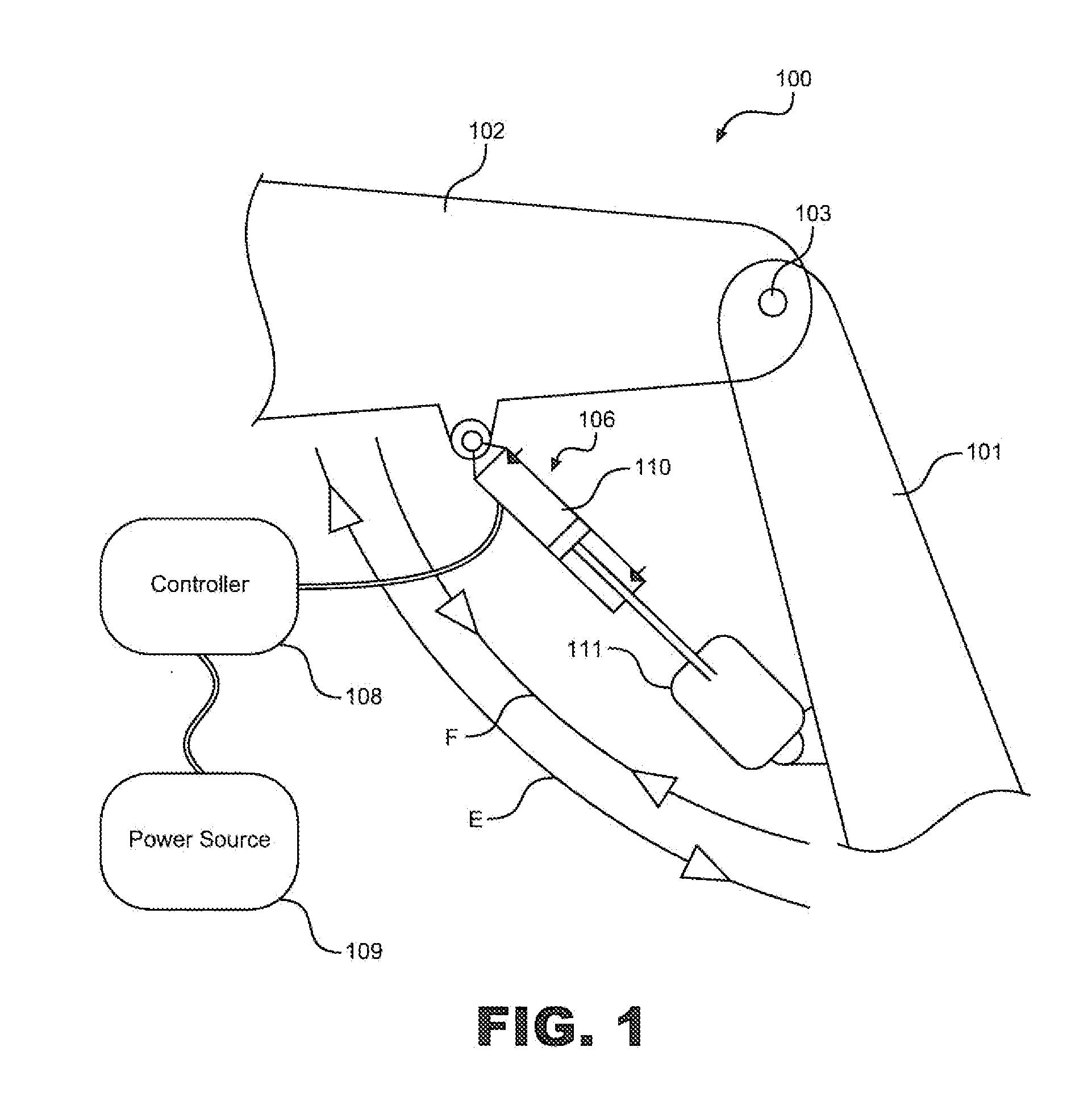
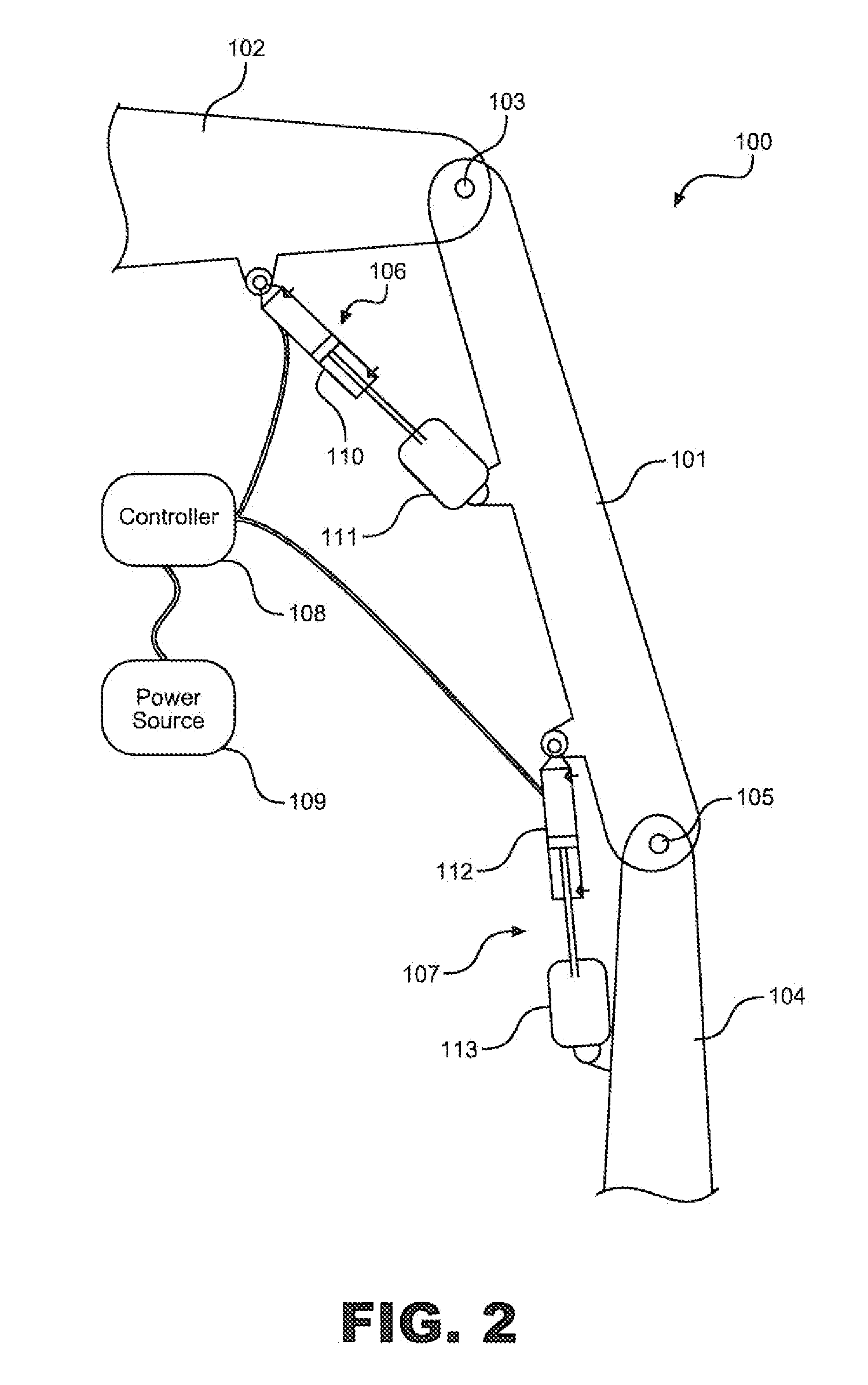
[0035]With initial reference to FIGS. 1 and 2, shown is a hip powered leg orthotic device 100, which is configured to be worn by a person and coupled to the person's lower limb. The orthotic contains at least a thigh link 101, and a hip link 102 that roughly correspond with a wearer's thigh and hips respectively. Although not depicted, it should be understood that straps or other devices may be utilized to connect orthotic device 100 to the wearer. Thigh link 101 and hip link 102 are connected by a hip jam 103. At minimum, hip joint 103 allows for extension and flexion along the sagittal plane of a person's body, but may allow additional degrees of freedom. The sagittal plane of a person's body should be understood to mean the imaginary plane that travels vertically from the top to the bottom of the body along the Y axis, dividing it into left and right portions. With reference, to FIG. 1, the hip extension direction is, depicted by arrow E and the hip flexion direction is depicted ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More