

Dual piezoelectric nano positioning and voltage electrical driver, its control method and controller
A piezoelectric driver, nano-positioning technology, applied in piezoelectric devices/electrostrictive devices, generators/motors, piezoelectric effect/electrostrictive or magnetostrictive motors, etc. Temperature zone, low cost, small volume and other issues, to achieve the effect of simple structure, large thrust and large working temperature zone
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0065] Example 1: Basic dual piezoelectric linear nanopositioning piezoelectric actuator
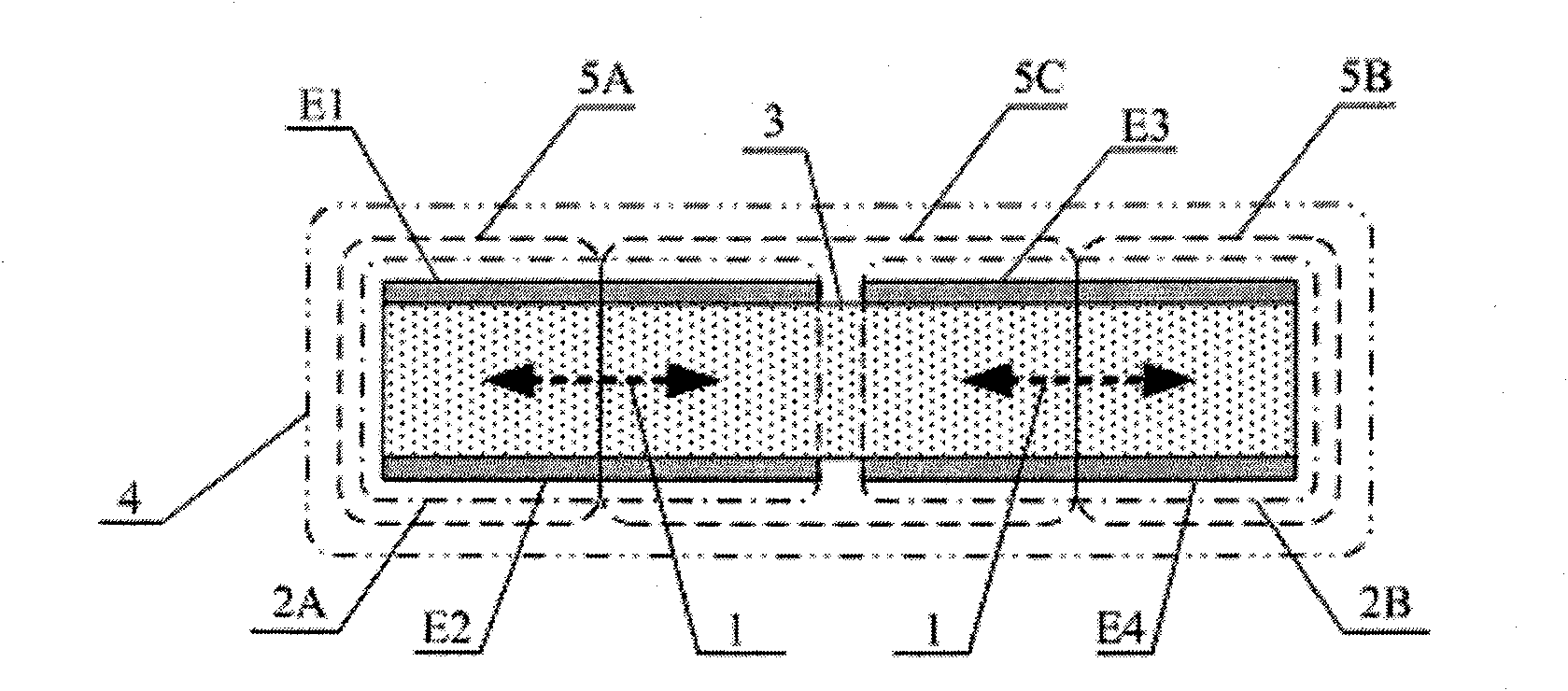
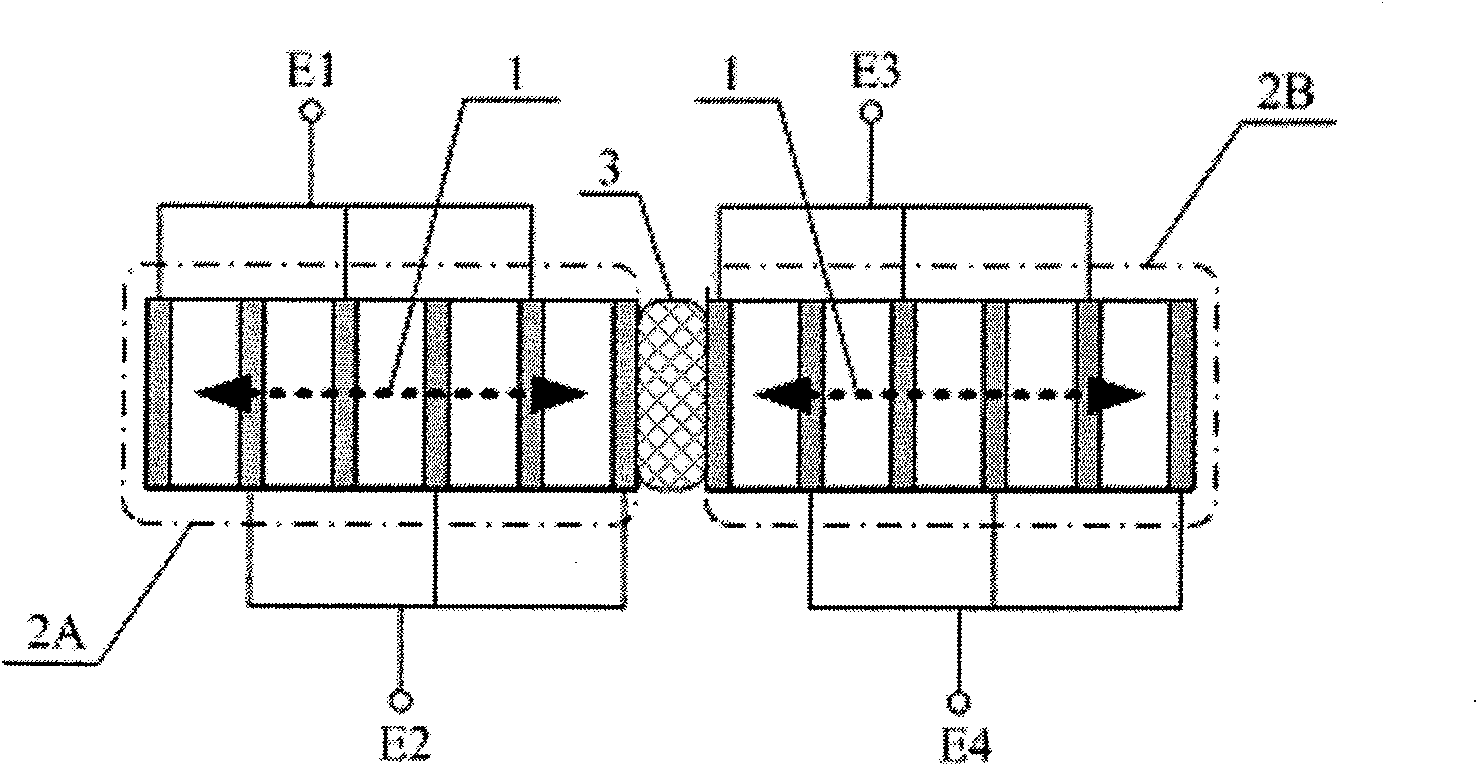
[0066] see Figure 1A , the two piezoelectric actuators on the left and right are fixedly connected to the connector 3 in a mechanically in series manner along the deformation direction 1 to form a two-connected body 4 that is independently controllable; or as Figure 1B : Divide the electrode of a piezoelectric actuator into two parts to form two piezoelectric actuators called the left piezoelectric actuator 2A and the right piezoelectric actuator 2B, which deform along the original deformation direction 1 and are integrated with the connecting body 3 The piezoelectric actuator of the component constitutes a dijoint 4 . The deformation refers to piezoelectric deformation.
[0067] Such as Figure 1A and 1B As shown, the left piezoelectric actuator 2A and the right piezoelectric actuator 2B are respectively bounded by their respective mid-sections along their deformation directions, an...
Embodiment 2
[0087] Embodiment 2: force body type driver
[0088] If the gravity of the dijoint itself is used as its pressure on the base body to generate friction and then generate driving force, this driving force is often relatively small and cannot meet many practical needs, especially when it is required to drive in the vertical direction. In this embodiment, by adding a force applying body, the left area, the middle area and / or the right area of the dijoined body are pressed against the substrate with the force applying body, which makes the dijoined body generate greater pressure on the base body to produce more Greater friction, and thus greater thrust.
[0089] Such as image 3 , the dijoined body 4 is placed on the base body 6 and acts on the left, middle and / or right regions of the dijoined body 4 with a force applying body 7, the force applying body 7 uses elastic force, gravity and / or electromagnetic force The dyad 4 is pressed onto the base body 6 and the dyad 4 is press...
Embodiment 3
[0090] Embodiment 3: Forced Pad Driver
[0091] Such as Figure 4 In this embodiment, on the basis of the above-mentioned embodiment, the force-bearing pad 8 is fixed on the left area 5A, the middle area 5C and / or the right area 5B of the two conjoined body 4, and the force-bearing pad 8 and the base body 6 act under pressure, To protect the dijoint 4 or the base 6, change the pressure between each zone and the base 6, change the area of action of the pressure, change the coefficient of static friction, in a word the maximum static friction between each zone of the dijoint 4 and the base 6 can be adjusted. The pressure between the force pad 8 and the base body 6 comes from the original pressure of the area where it is located and the base body, and also can come from its own force on the base body, including its gravity, electromagnetic force, elastic clamping force, and can also come from external force. The pressure that the force body presses it against the base, or the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More