

Thumb mechanism for under-driven adaptive prosthetic hand
An adaptive and underactuated technology, applied in artificial arms and other directions, can solve the problems of lack of realistic human hands, the placement of thumb and thumb, and the lack of anthropomorphic movement flexibility, to achieve improved flexibility and reliability, and a realistic appearance. , the effect of freedom of movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
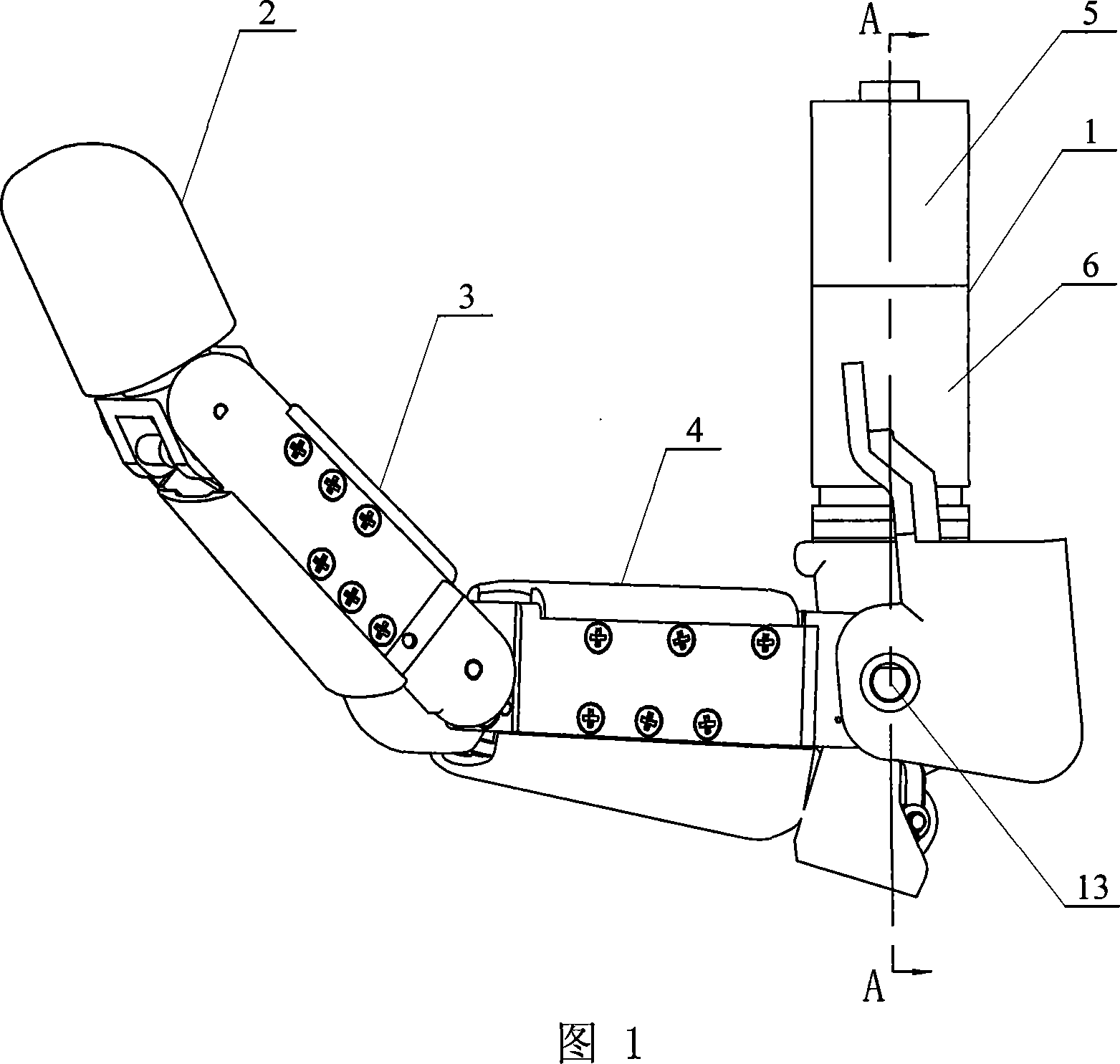
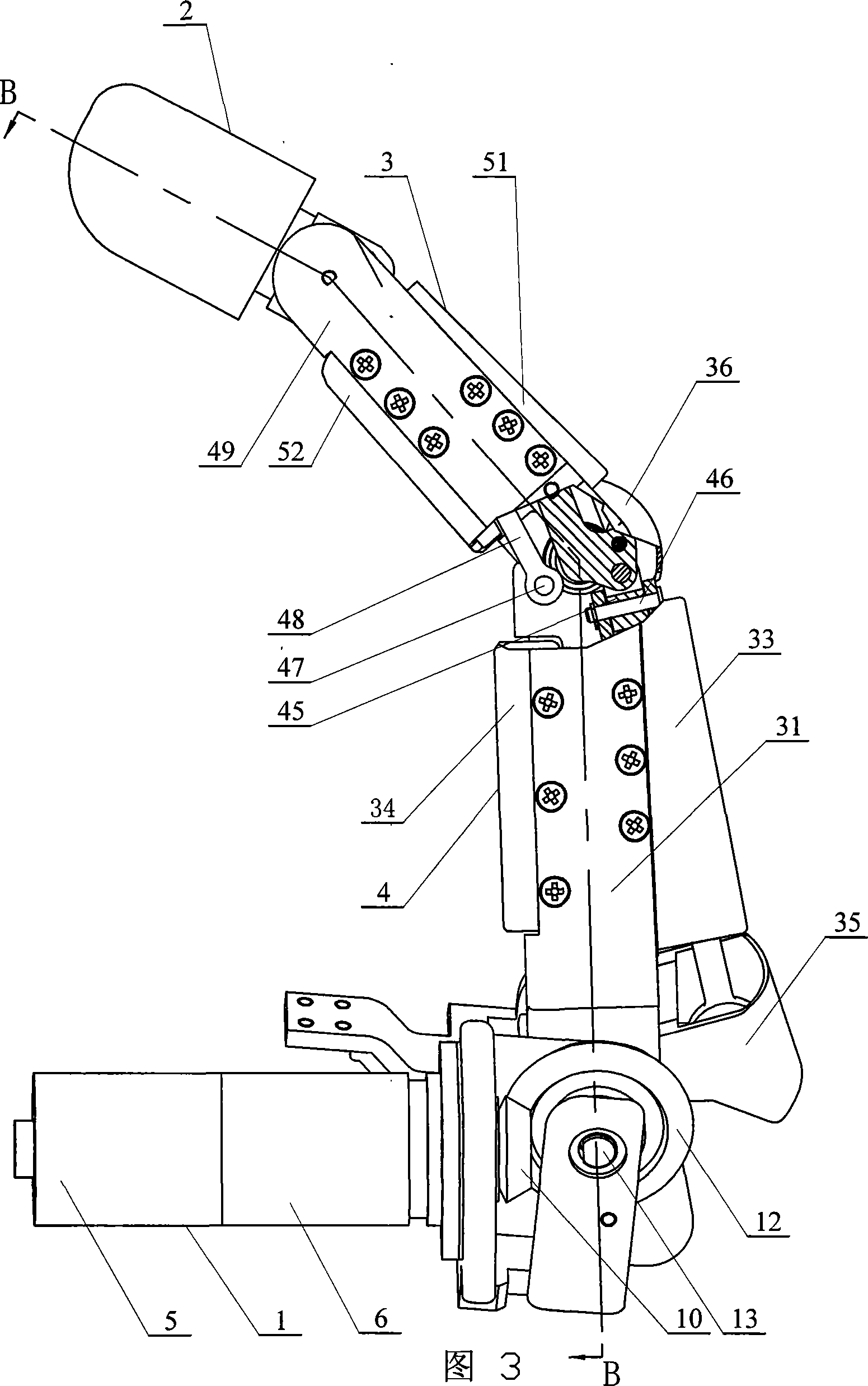
[0007] Specific embodiment one: this embodiment is described in conjunction with Fig. 1, and this embodiment is made up of transmission mechanism 1, far knuckle 2, middle knuckle 3 and proximal knuckle 4; The rear end of described transmission mechanism 1 and proximal knuckle 4 rotates Connection; the front end of the proximal knuckle 4 is rotationally connected with the rear end of the middle knuckle 3, and the front end of the middle knuckle 3 is rotationally connected with the rear end of the distal knuckle 2.
specific Embodiment approach 2
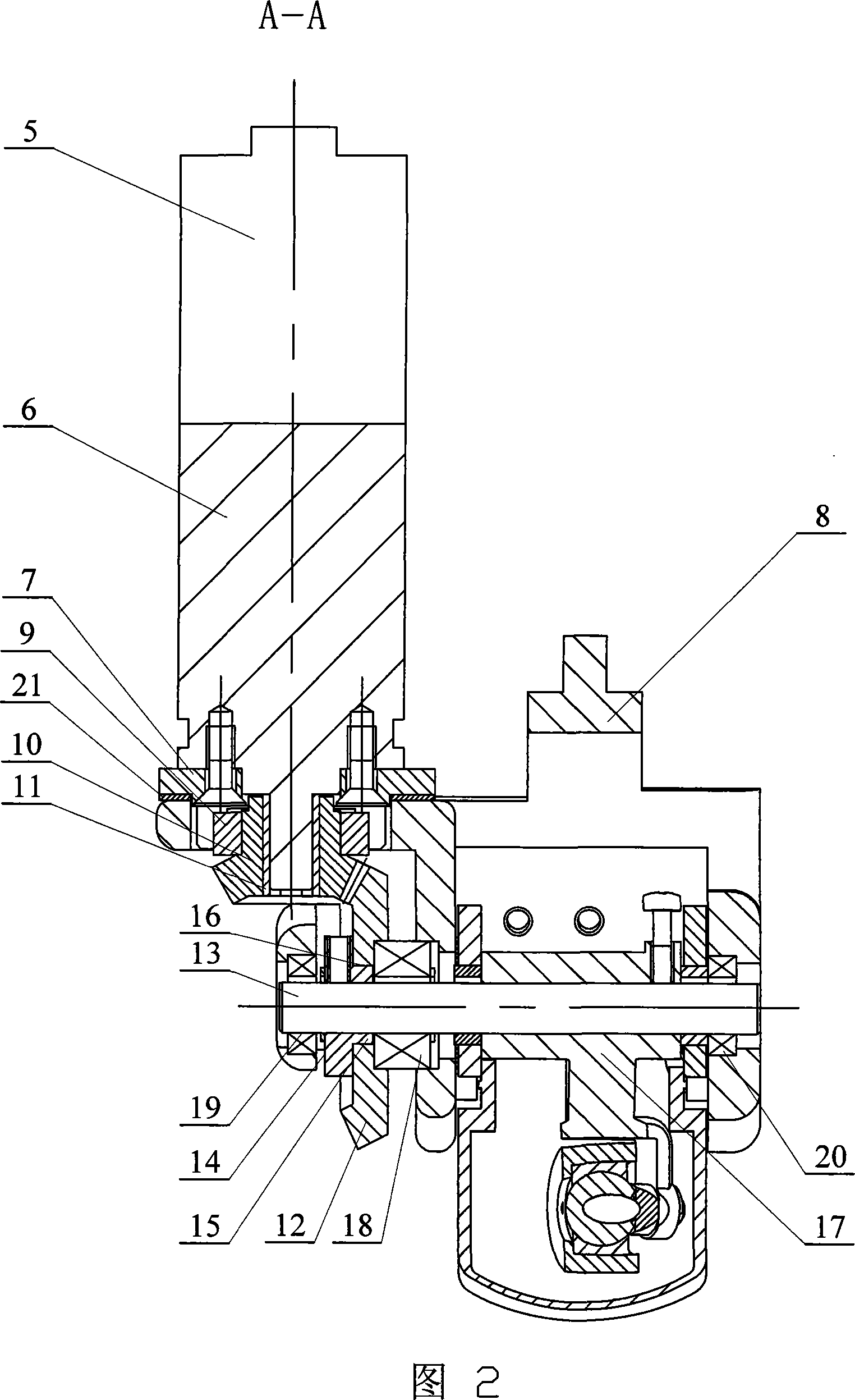
[0008] Specific embodiment two: This embodiment is described in conjunction with Fig. 1 and Fig. 2, and the transmission mechanism 1 of this embodiment is composed of a stepper motor 5, a reducer 6, a motor base 7, a thumb base 8, a motor bearing 9, and a small bevel gear 10 , a motor sleeve 11, a large bevel gear 12, a base joint shaft 13, a gear retainer 14, a sensor 17, a thrust bearing 18, and a first bearing 20; the output shaft of the stepping motor 5 and the input of the reducer 6 The shaft transmission is connected, the reducer 6 is fixedly connected to the motor base 7, the motor base 7 is fixedly connected to the thumb base 8, the motor base 7 is equipped with a motor bearing 9, and the small bevel gear 10 is mounted on the reducer 6 through a motor sleeve 11. The small bevel gear 10 meshes with the large bevel gear 12 on the output shaft, the large bevel gear 12 is installed on the base joint shaft 13, and the two ends of the base joint shaft 13 are installed in the ...
specific Embodiment approach 3
[0009] Specific embodiment three: This embodiment is described in conjunction with Fig. 2. The difference between this embodiment and specific embodiment two is: the transmission mechanism 1 of this embodiment is also increased with a motor adjustment gasket 21; the motor adjustment gasket 21 is installed Between the motor base 7 and the thumb base 8. Such setting is used to adjust the meshing gap between the large bevel gear 12 and the small bevel gear 10 .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More