

Glue spreading and positioning system of robot
A positioning system and robot technology, applied in the field of robot gluing positioning system, can solve the problems of sealing gap, overflowing installation position, unable to automatically adjust different types of glass gluing procedures, etc., and achieve synchronous and precise centering and positioning Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
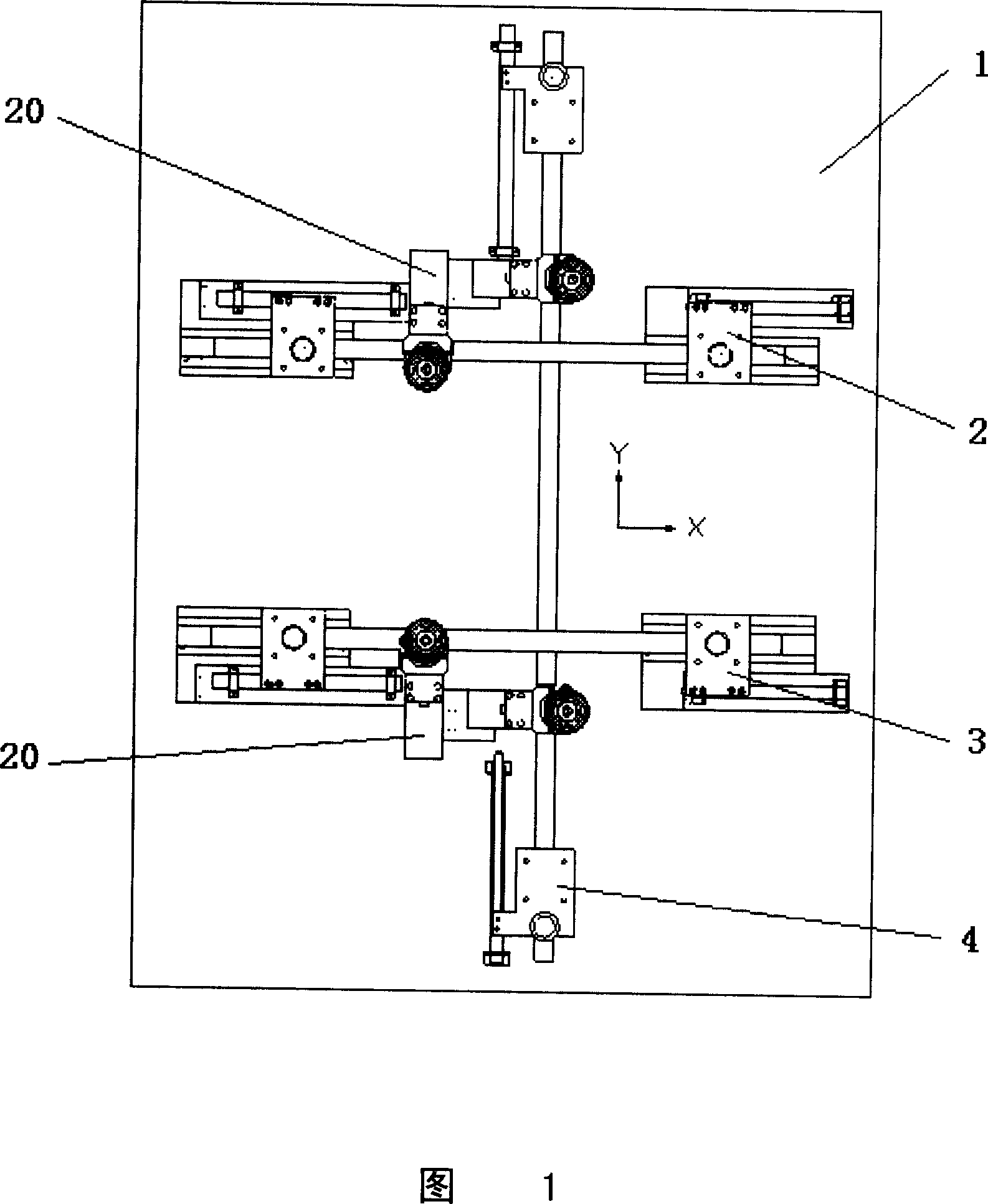
[0015] As shown in Fig. 1, the present invention comprises a centering platform 1, on the centering platform 1, two groups of centering units 2, 3 in the X direction are horizontally arranged at a certain distance, and the centering units 2, 3 in the two groups of X directions A group of centering units 4 in the Y direction are arranged horizontally in the vertical direction of 3 . Two sets of suction cup units 20 for positioning the glass in the Z direction are also arranged on the centering platform 1 .
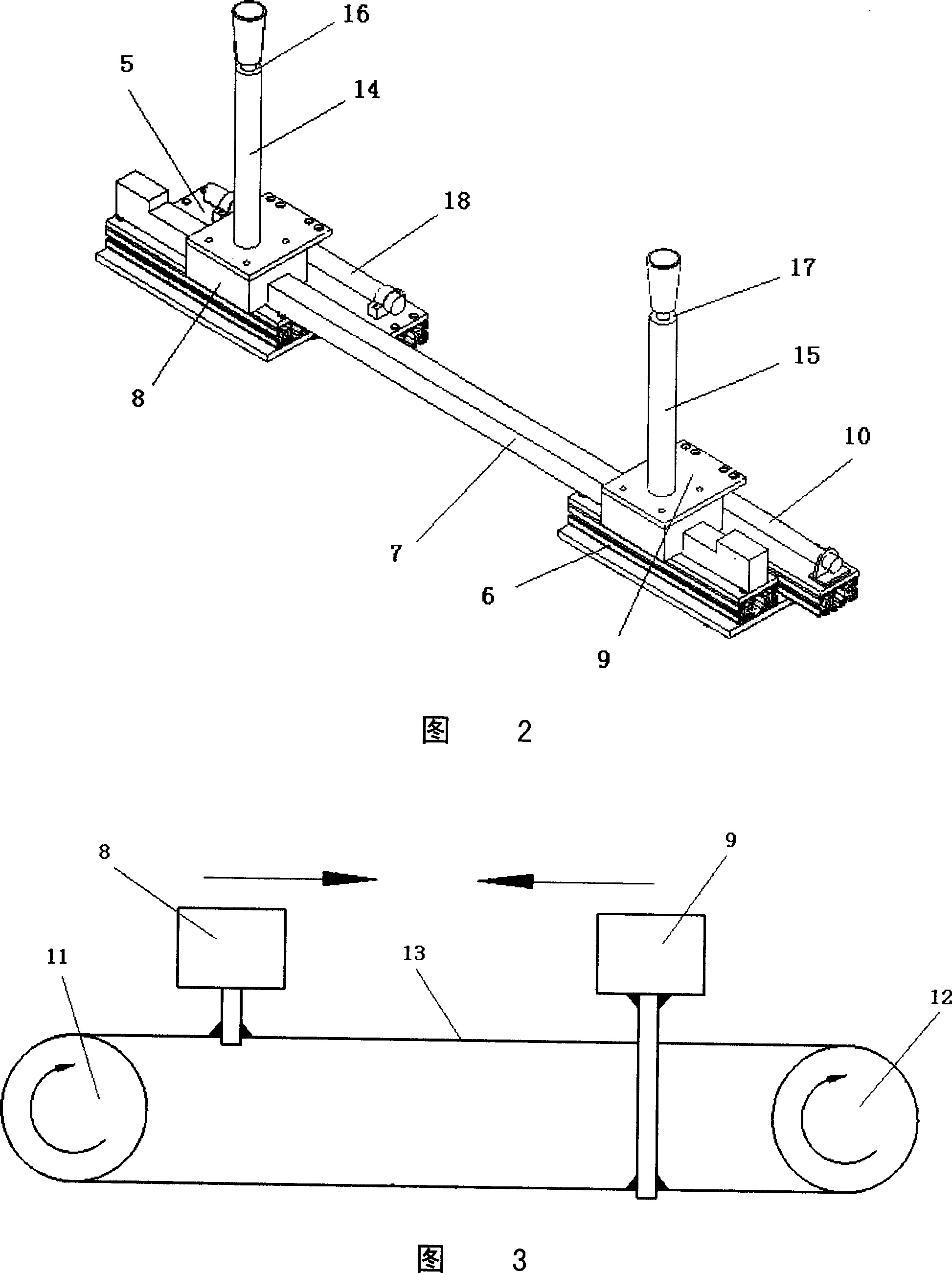
[0016] As shown in Fig. 2 and Fig. 3, the structures of the centering units 2 and 3 of two groups of X directions and the centering units 4 of one group of Y directions of the present invention are basically the same, so only one of the centering units (regardless of is that group) as an example. The centering unit includes two bases 5 and 6 whic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More