

Swinging arm type transmission line polling robot
A technology for patrolling robots and power transmission lines, applied in the field of robotics, can solve problems such as high risk, difficulty in ensuring accuracy, and low inspection efficiency, and achieve strong obstacle-crossing capabilities, extended operating range, and low-accuracy solutions. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
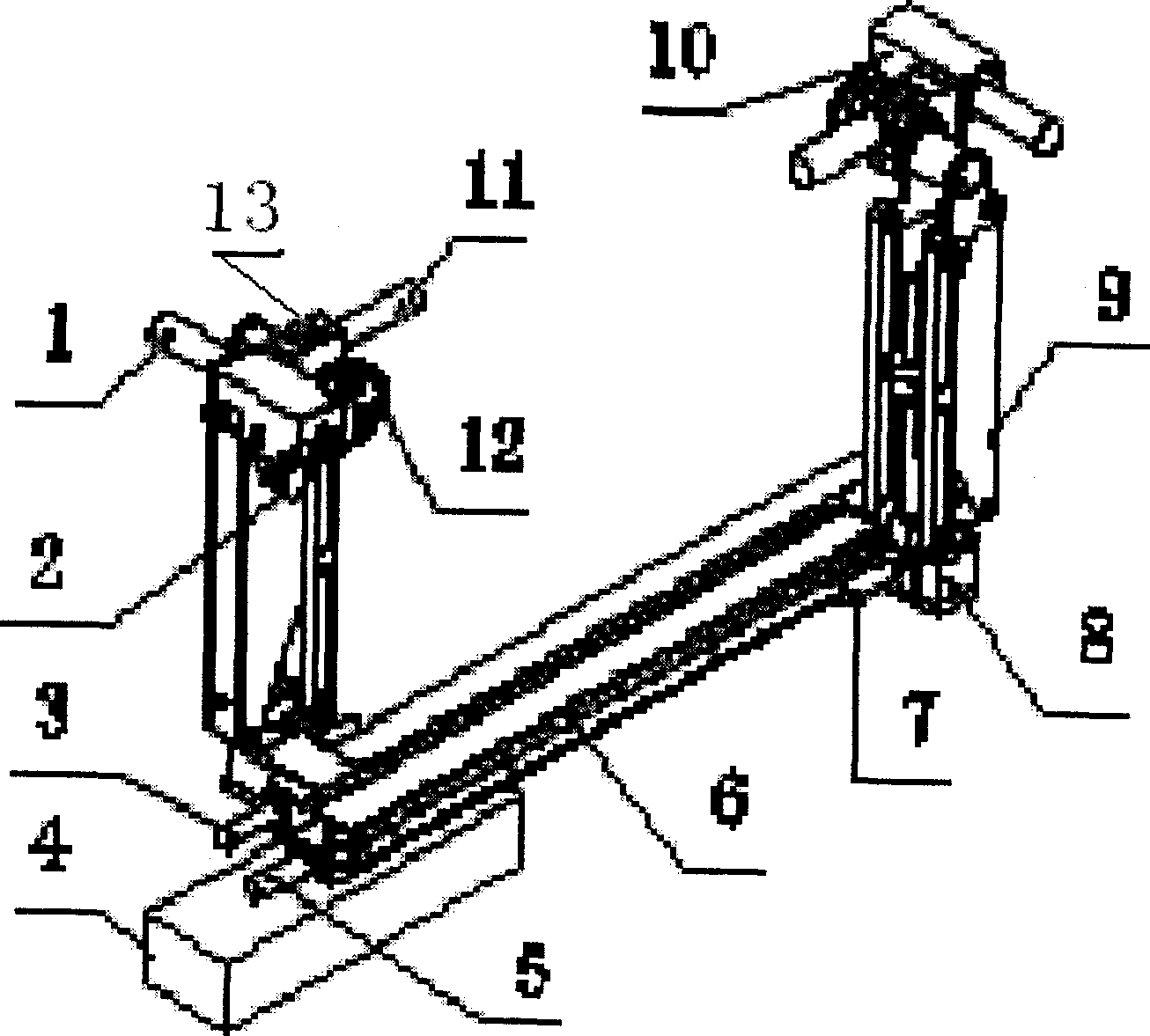
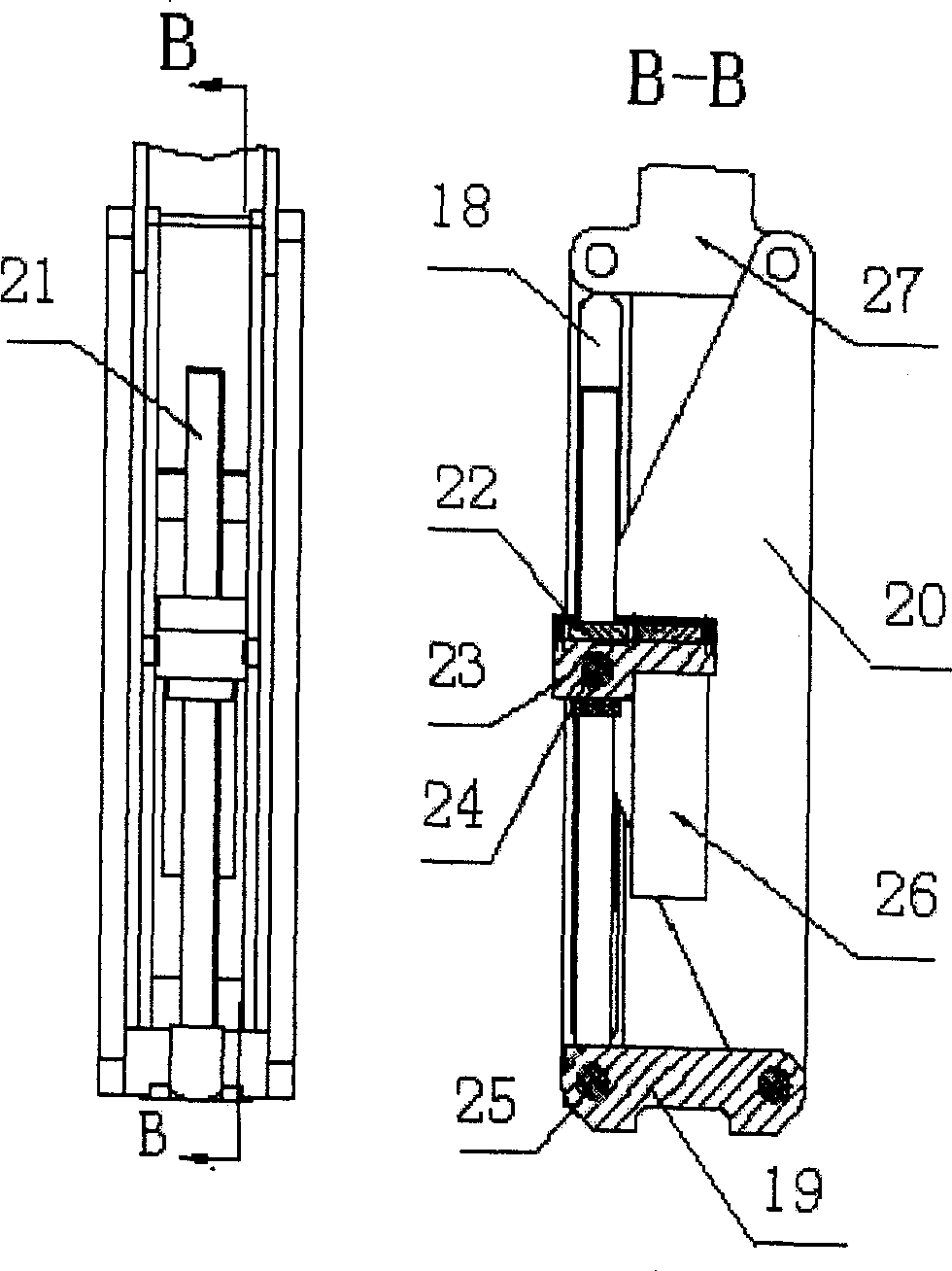
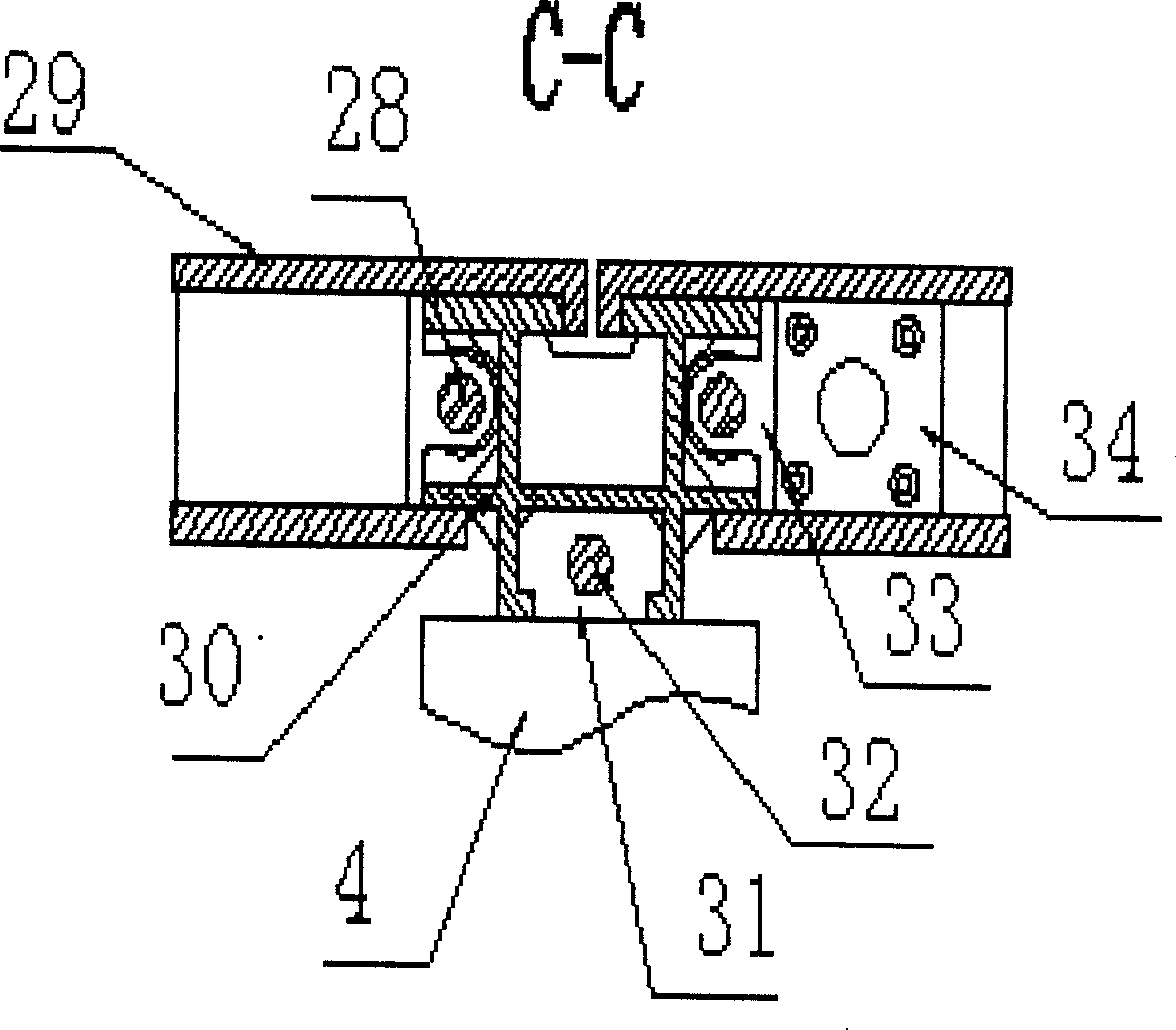
[0011] Reference attached Figure 1-6 , illustrating the implementation of the structure of the swing arm type transmission line automatic inspection robot structure is as follows:
[0012] The transmission line inspection robot of the present invention includes a pair of arms 9, and the upper end of the arms 9 is equipped with a clamping device 10, which includes a roller 12 that can be hung on the transmission line and a multipurpose gripper 2 that can grasp the angle steel and the transmission line. The lower end of the arm is connected to the sliding table 8 that can slide along the guide rail, and the arm can also rotate around the connecting axis in the vertical plane. Each small arm has 3 degrees of freedom. The pitch joint for axis rotation.
[0013] In the clamping device 10 , the jaw driving motor 1 drives the screw rod-rack-gear to rotate, so as to realize the loosening and clamping of the jaws. The rollers 12 are directly driven by the roller drive motor 11 .
[...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More