

Two degrees of freedom high speed translation parallel robot mechanism by rotating subsidiary drive
A technology of translational motion and revolving joints, which is applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of high-speed movement of unfavorable mechanisms, low static and dynamic stiffness, etc., and achieve the goal of ensuring dynamic and static stiffness and improving stress conditions Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
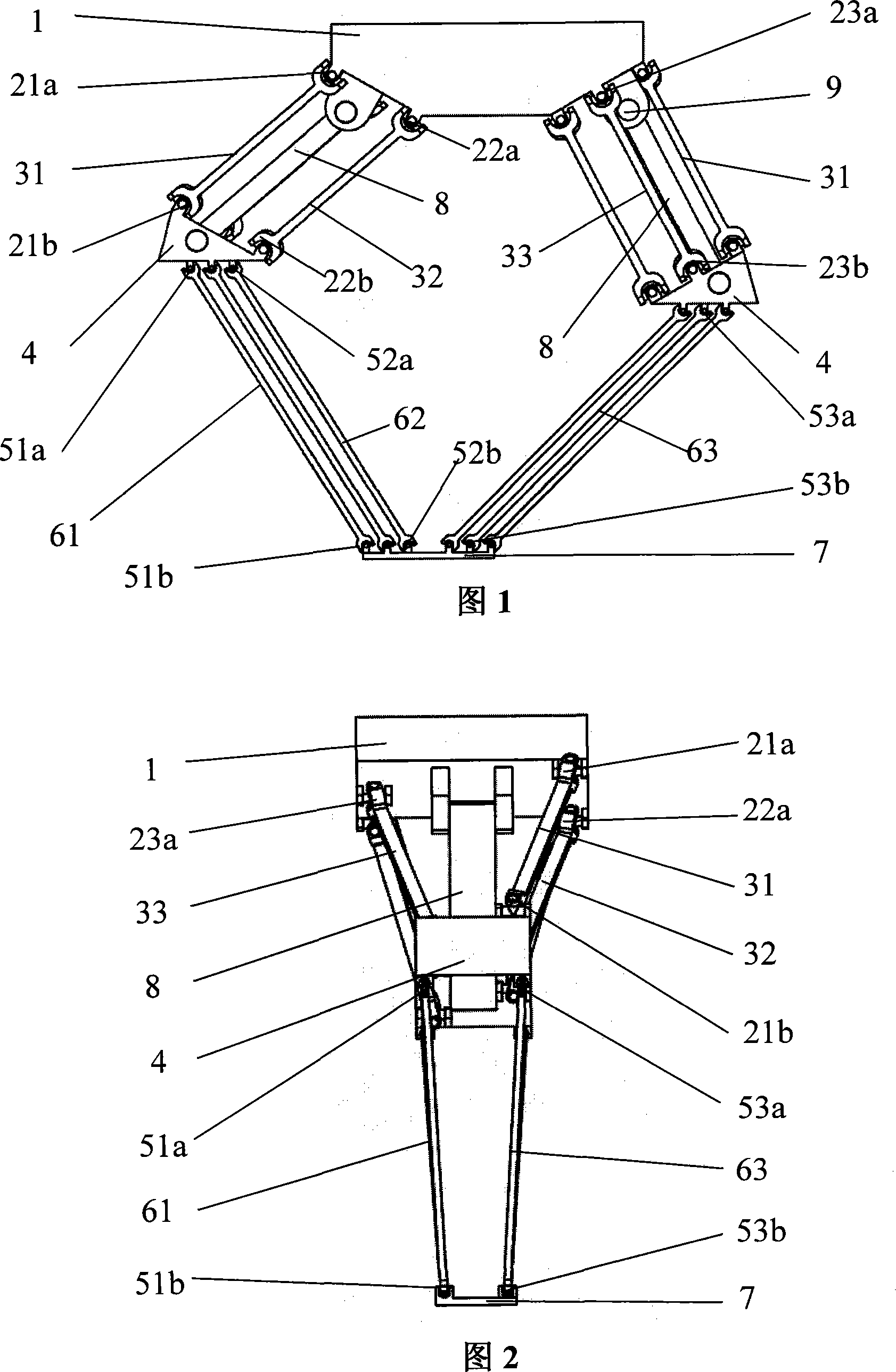
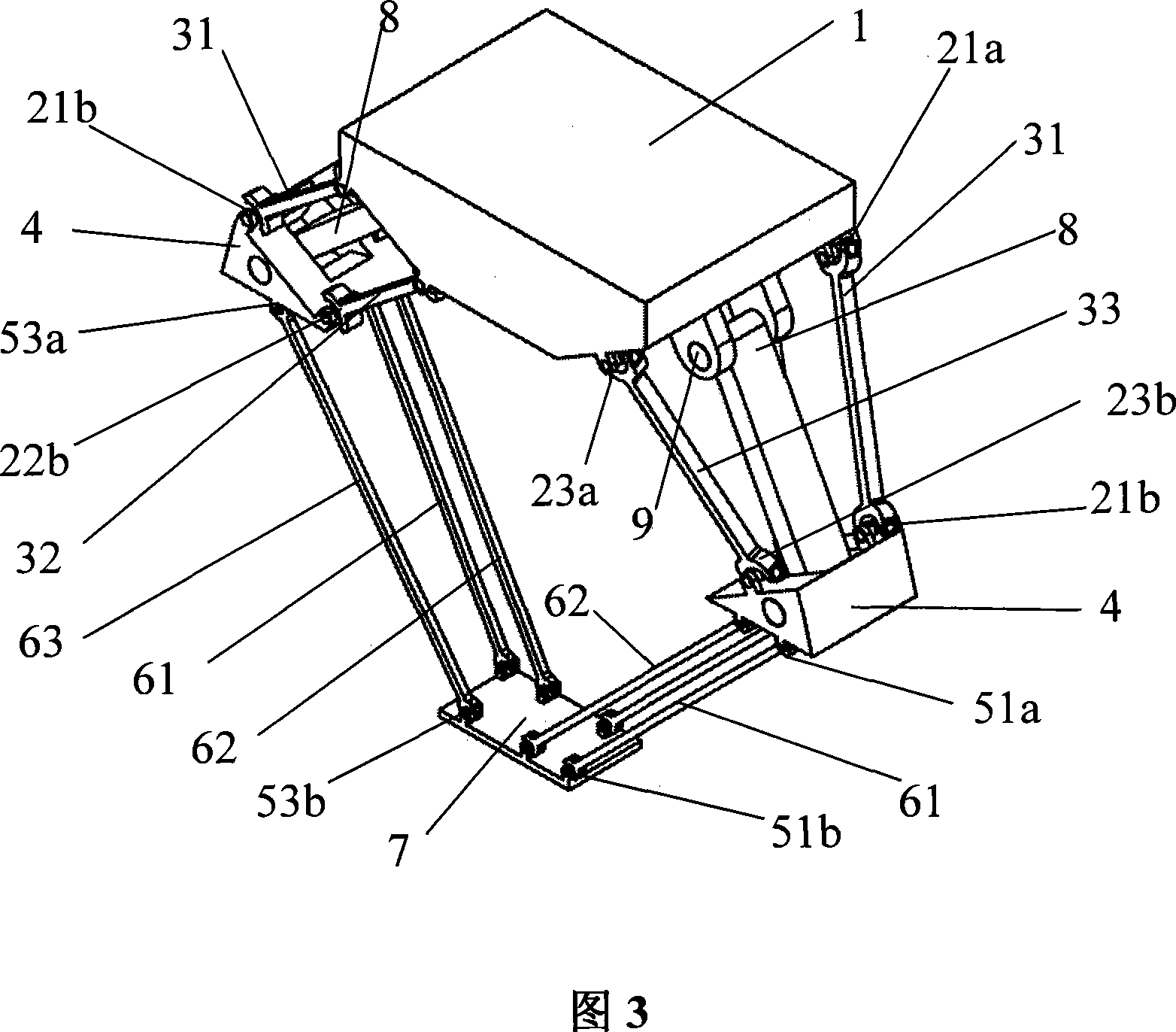
[0019] Example 1. Combining Figures 1 to 3, the two-degree-of-freedom high-speed translational motion parallel robot mechanism driven by the rotating pair of the present invention, the positioning mechanism is composed of three passive branch chains, and each passive branch chain is connected in series by a Hooke hinge, a connecting rod and a Hooke hinge composition; the first, second and third passive branch chains 21a, 31, 21b; 32 and 33 are equal in length and arranged as follows: the first, second and third passive branch chains 21a, 31 and 21b; 22a, 32 and 22b; Passive branch chains 23a, 33, 23b are on one side, first and second passive branch chains 21a, 31, 21b; 22a, 32, 22b are on the other side, first and second passive branch chains on the same side Chain 21a, 31, 21b; Two connecting rods 31, 32 of 22a, 32, 22b are parallel to each other, and are not parallel to the connecting rod 33 of the third passive branch chain 23a, 33, 23b on the other side; The second and t...
Embodiment 2
[0020] Example 2. 5 and 6, the positioning mechanism of the two-degree-of-freedom high-speed translational motion parallel robot mechanism driven by the rotating pair of the present invention can also constrain the position of the intermediate member 4 by forming a parallelogram mechanism with the positioning connecting rod 13, the rotating pair 9 and the active rod 8. The attitude is the same as that of the base 1 .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More