Two degrees of freedom translation parallel mechanism
A technology of translational motion and degrees of freedom, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of low rigidity of vertical motion plane, low rigidity, increased control difficulty and cost, etc., to reduce geometric quality, improve The effect of stress condition and performance improvement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
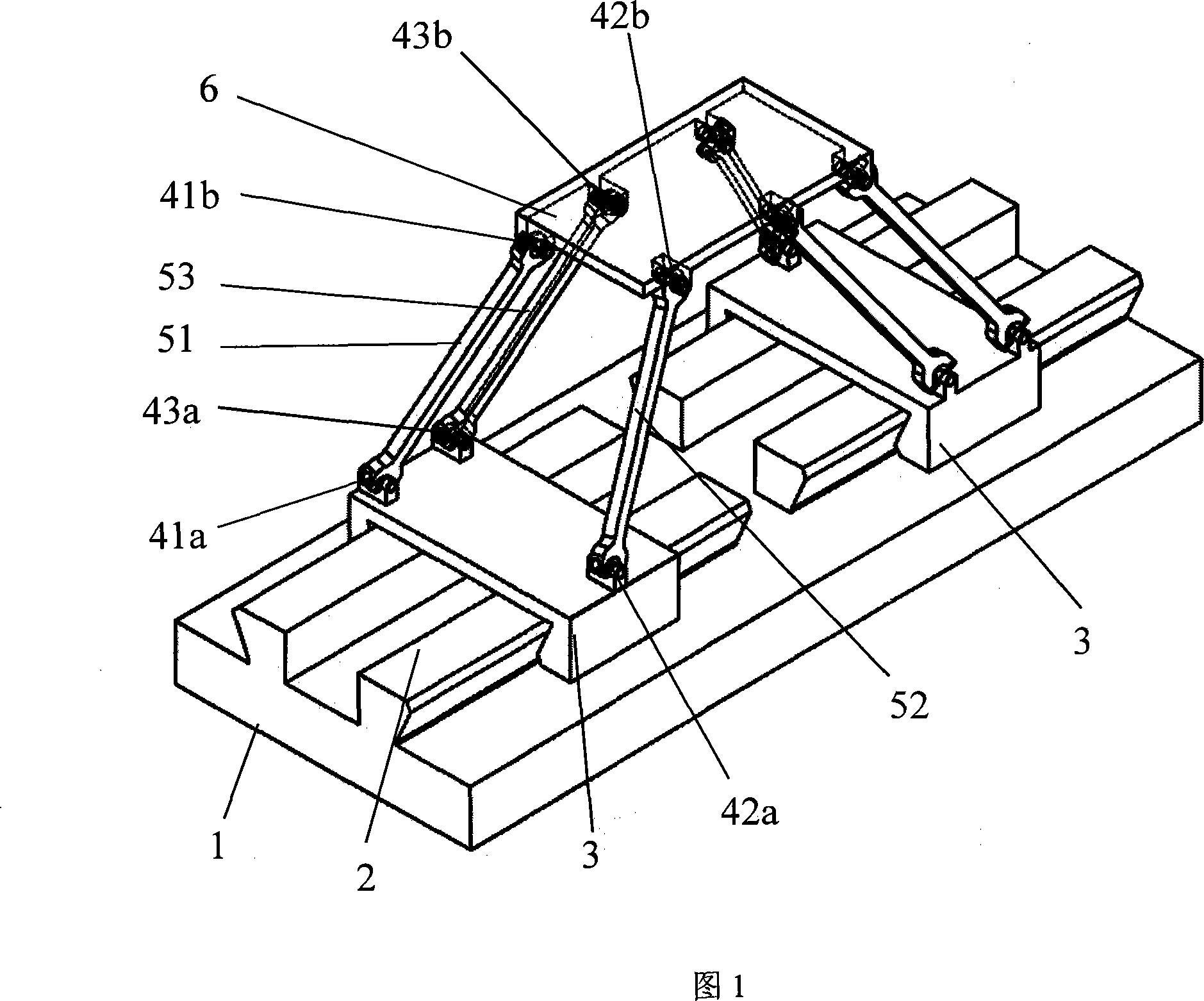
[0014] Example 1. In the two-degree-of-freedom translational motion parallel mechanism of the present invention, except that the above-mentioned structure is the same, by driving the moving slider 3, the moving slider 3 is moved in translation on the two guide rails 2 whose motion axes on the fixed platform 1 coincide. The constraint of the branch chain enables the motion platform 6 to realize translational motion with two degrees of freedom, as shown in Fig. 1 .
Embodiment 2
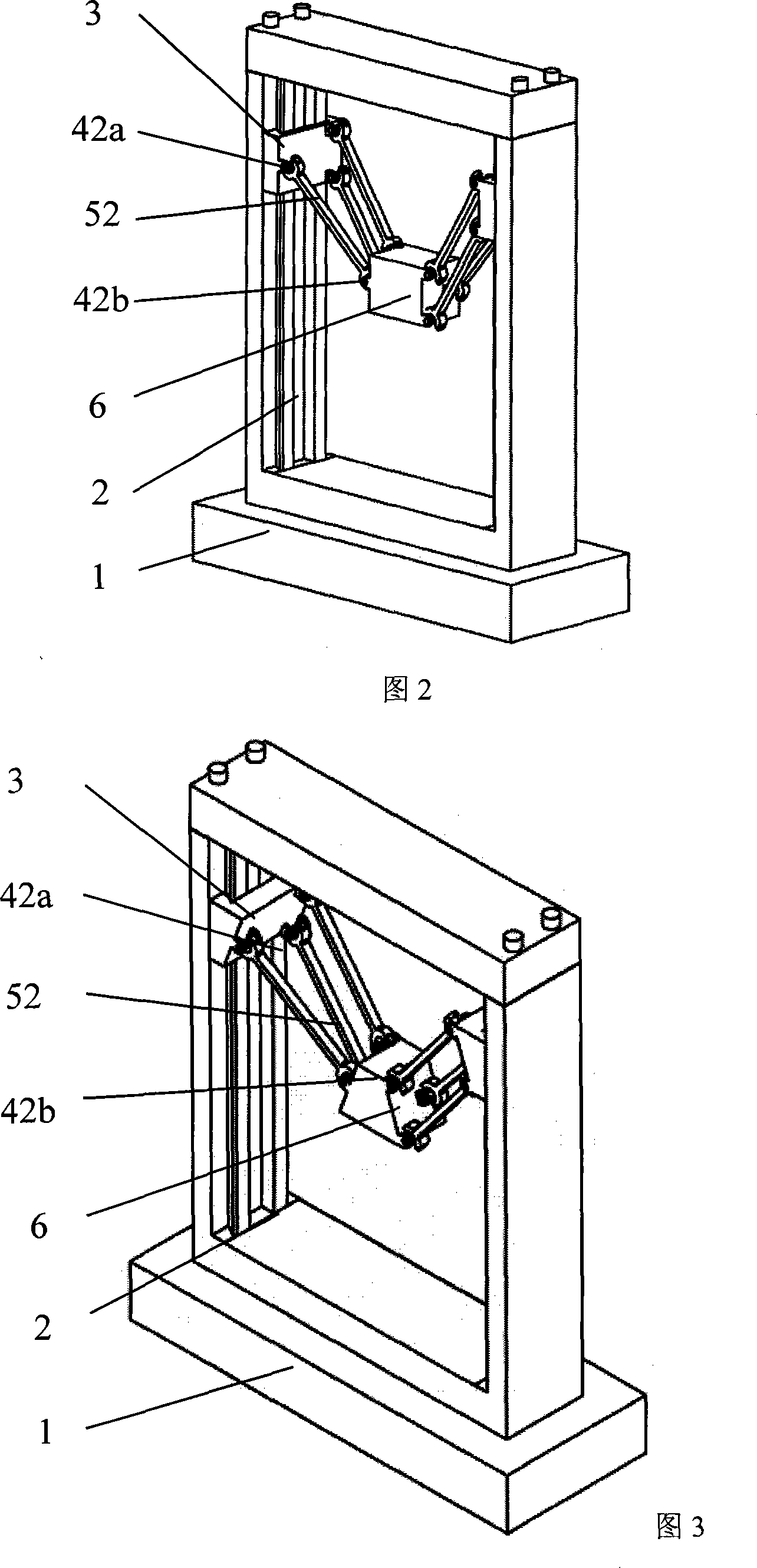
[0015] Example 2. In the two-degree-of-freedom translational motion parallel mechanism of the present invention, except that the above structure is the same, the motion axes of the two guide rails 2 are parallel to each other, so the motion directions of the moving sliders 3 are parallel to each other, as shown in Figure 2 .
Embodiment 3
[0016] Example 3. In the two-degree-of-freedom translational motion parallel mechanism of the present invention, except that the above-mentioned structure is the same, the centers of the first, second, and third Hooke hinges 41a, 42a, and 43a connected to the moving slider 3 form a triangle, which is connected to the moving platform 6 The centers of the connected first, second and third Hookee hinges 41b, 42b and 43b form a triangle, and the two triangles are parallel or non-parallel to the movement axes of the two guide rails 2, as shown in FIG. 3 . For example, by arranging that the plane of the Hooke hinge is not parallel to the direction of the axis of the guide rail, the movement range of the restrained branch chain can be larger, so that the movement platform will not be reduced due to the movement interference of the Hooke hinge.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More