

Three-freedom degree spherical surface parallel connected anthropomorphic robot bionic hip-joint with bias output
A technology of humanoid robot and degree of freedom, which is applied in the direction of manipulators, manufacturing tools, joints, etc., can solve the problems of small working space, reduced driving ability, gap, etc., achieve the increase of overall static stiffness, increase of linear displacement stiffness, and improve output position accuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
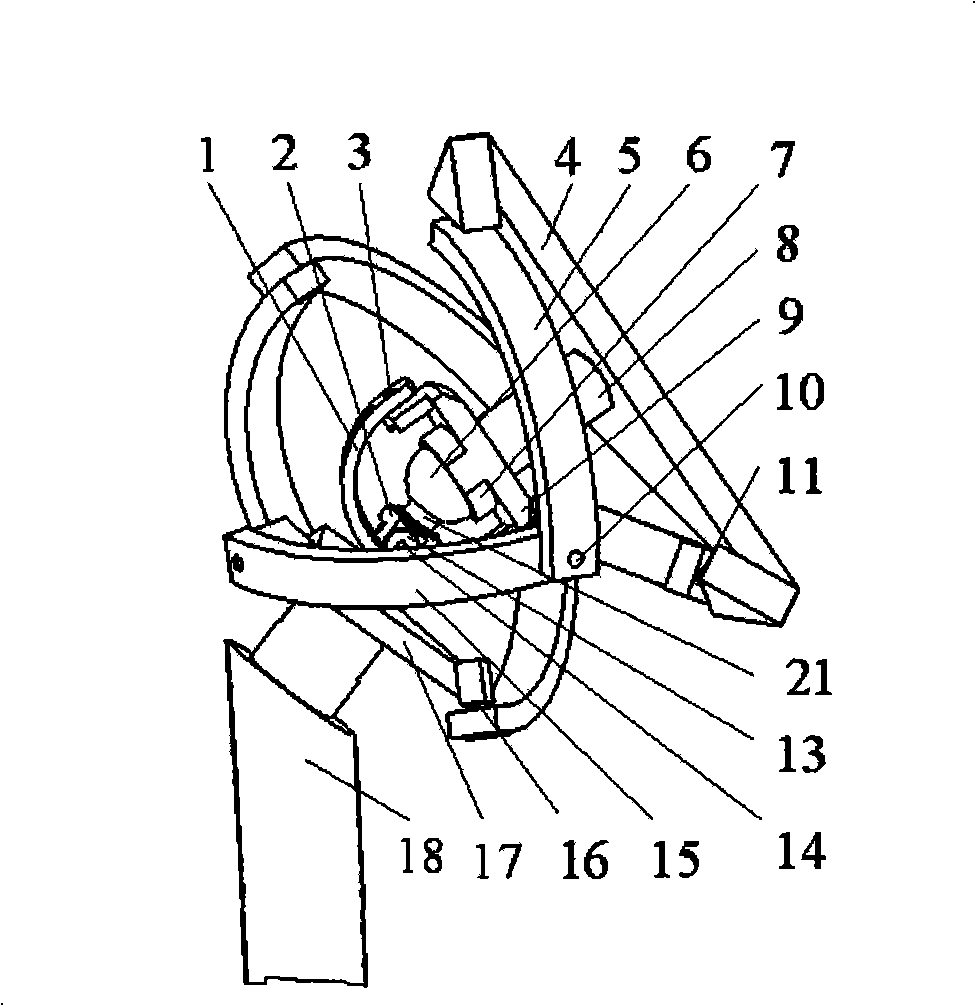
[0061] figure 1 It is the first embodiment disclosed in the present invention. It is a three-degree-of-freedom spherical parallel humanoid robot bionic hip joint with a biased output with fixed binaural brackets. It consists of a three-degree-of-freedom spherical parallel mechanism, a central spherical hinge, and a biased output. It is composed of output rod unit. The central spherical hinge is a central spherical hinge with a large working space with a fixed double-ear bracket, and includes a double-ear bracket 9, a lower support rod 8, and a U-shaped shift fork 1 and a double-ear bracket 9 to form a rotating connection pin Shaft (3, 3'), cylindrical straight output rod 21 (including a combination of straight output rod 12'), rotating bracket 2, supporting pin (14, 14') and supporting roller (13, 13'), supporting hemisphere The socket 7, the ball head 6, and the U-shaped shift fork 1. The three-degree-of-freedom spherical parallel mechanism includes a fixed platform 4, a drive ...
Embodiment 2
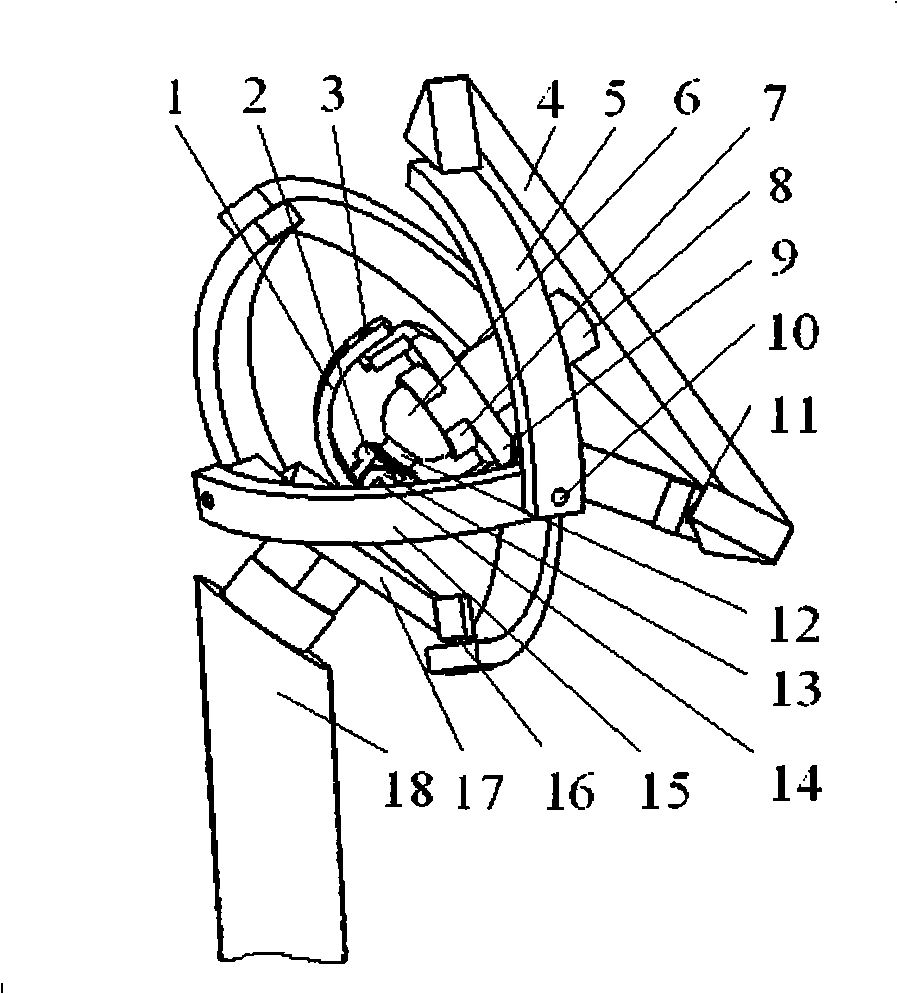
[0064] figure 2 This is the second embodiment disclosed in the present invention. It is a three-degree-of-freedom spherical parallel humanoid robot bionic with offset output in which the outer end of the straight output rod and the movable platform are connected in a prismatic form, and the two-ear bracket is fixed. The hip joint is composed of a 3-DOF spherical parallel mechanism, a central spherical hinge, and an offset output rod unit. The central spherical hinge is a central spherical hinge with a large working space with a fixed double-ear bracket, and includes a double-ear bracket 9, a lower support rod 8, and a U-shaped shift fork 1 and a double-ear bracket 9 to form a rotating connection pin Shaft (3, 3'), round-prismatic straight output rod 12 (including a combination of straight output rod 12'), rotating bracket 2, support pin (14, 14') and support roller (13, 13'), Supporting hemispherical socket 7, ball head 6, and U-shaped shift fork 1. The three-degree-of-freedom s...
Embodiment 3
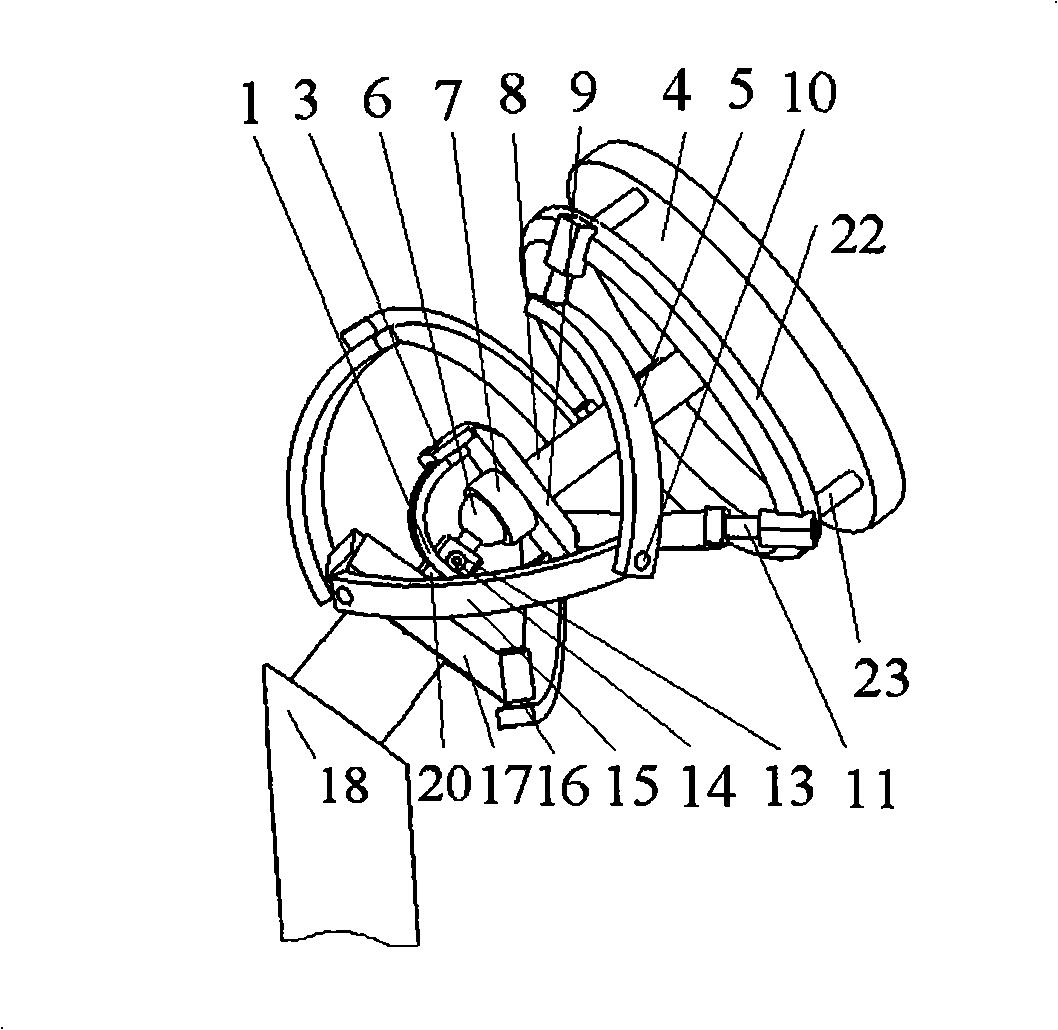
[0066] image 3 This is the third embodiment disclosed in the present invention, which is a bionic hip joint of a three-degree-of-freedom spherical parallel humanoid robot with an offset output and a two-ear bracket rotating type. It also consists of a 3-DOF spherical parallel mechanism, a central spherical hinge, and a biased output rod unit. The central spherical hinge is a double-ear bracket rotating type central spherical hinge with a large working space. It includes a double-ear bracket 9, a lower support rod 8, and a U-shaped shift fork 1 and a double-ear bracket 9 to form a rotating connection pin. Shaft (3, 3'), flat-cylindrical straight output rod 20 (including a combination of flat-straight output rod 19'), support pin (14, 14') and support roller (13, 13'), supporting hemisphere The socket 7, the ball head 6, and the U-shaped shift fork 1. The three-degree-of-freedom spherical parallel mechanism includes a fixed platform 4, a drive input shaft (11, 11', 11"), a lower c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More