

Step motor controlling method
A control device, stepper motor technology, applied in the direction of motor generator control, control system, electrical components, etc., can solve problems such as inability to stop, achieve rapid positioning, prevent excessive rotation speed, and the effect of oscillating motion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
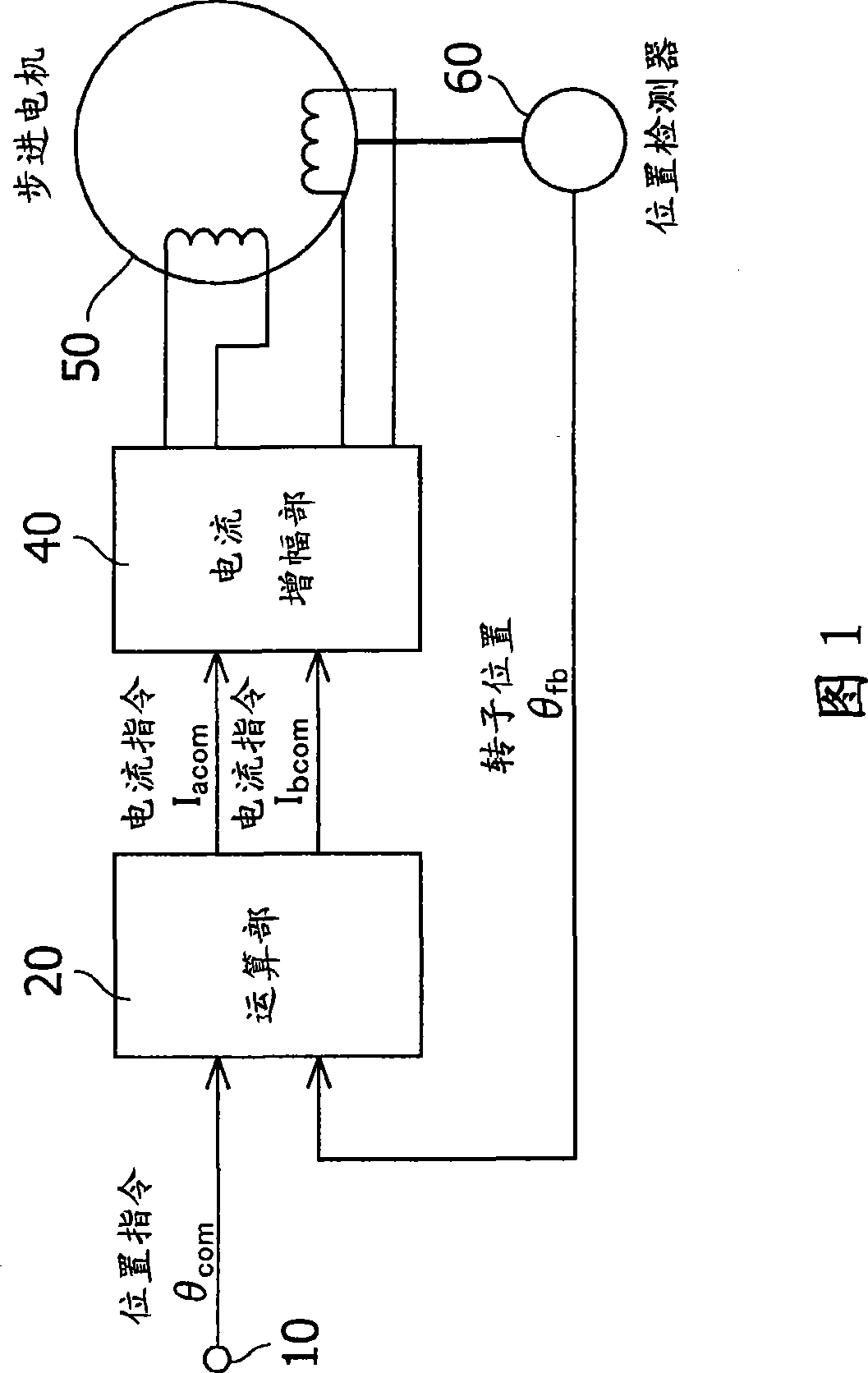
[0053] FIG. 1 is a block diagram showing the overall structure of a stepping motor control device according to an embodiment of the present invention.
[0054] In Fig. 1, through the position command input terminal 10, the position command θ for the rotor of the stepper motor 50 is sent in the form of pulse signal com input to the calculation unit 20 . The position detector 60 is to detect the actual position of the above-mentioned rotor (hereinafter referred to as the rotor position) θ fb If provided, the output thereof is input to the above-mentioned computing unit 20 . In this embodiment, as the stepping motor 50, a stepping motor having a two-phase hybrid structure is used.
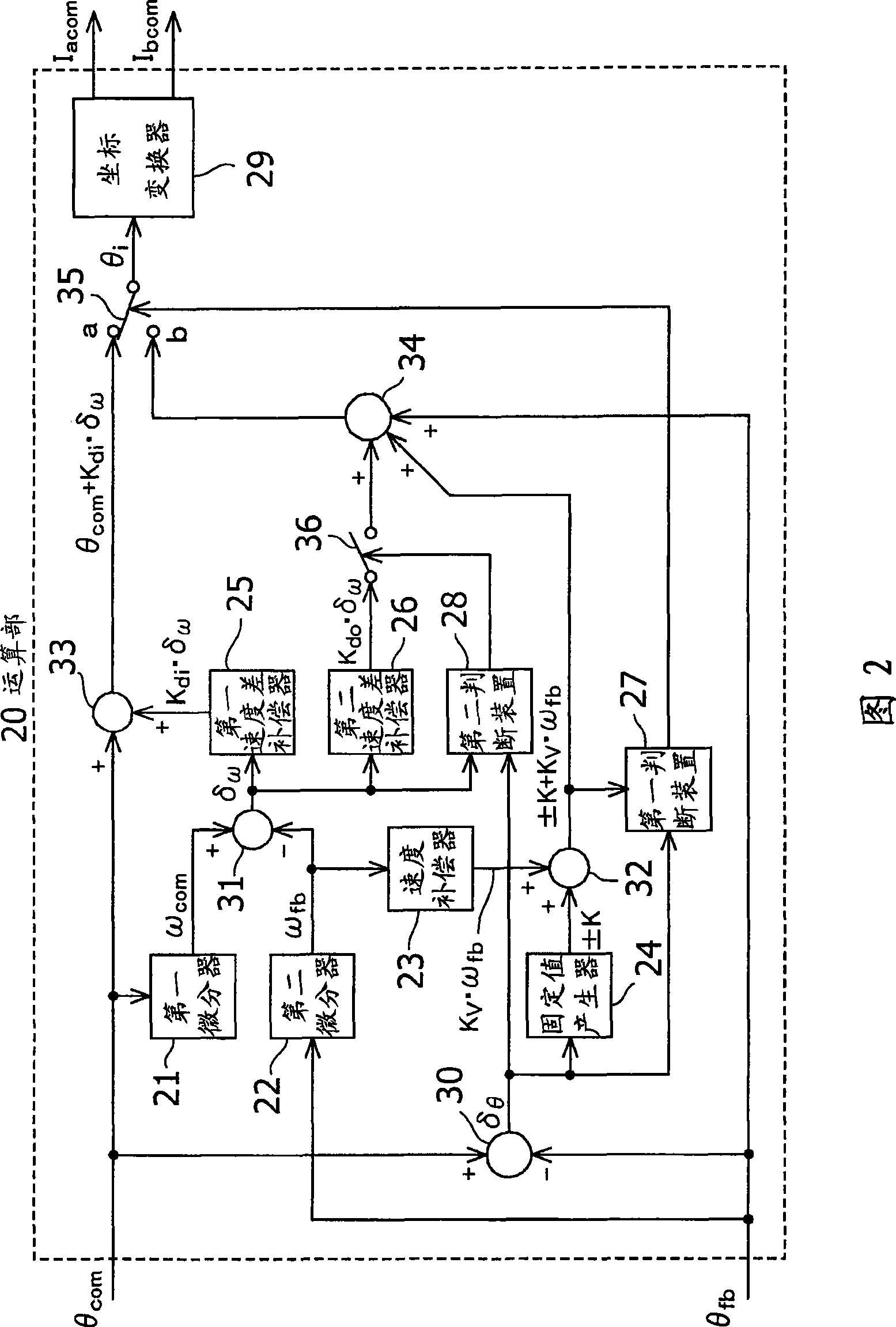
[0055] As described below, the calculation unit 20 according to the above-mentioned position command θ com and the actual position θ fb , calculate the phase A current command I acom and B-phase current command I bcom . Current amplifying part 40 is made up of well-known PWM converter, will cor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More