Path planning method of motor crane robot
A technology of path planning and robotics, applied in the direction of instruments, biological neural network models, data processing applications, etc., can solve problems such as local minima
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The specific implementation method of the path planning of the improved path planning algorithm based on the neural network energy function of the present invention is divided into the following steps:
[0016] Step 1: Define the path total energy function.
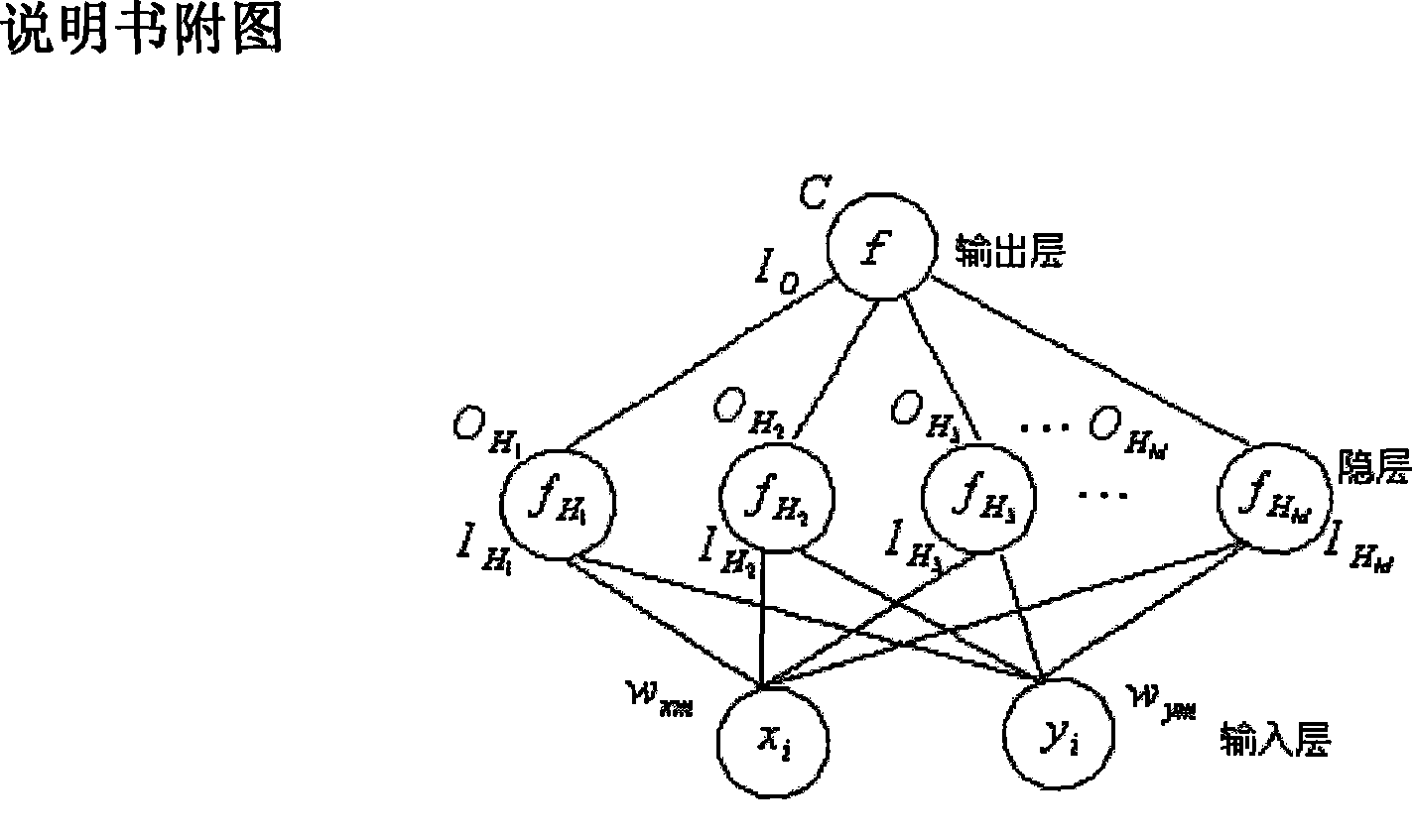
[0017] The collision penalty function of a path is defined as the sum of the collision penalty functions of each path point, and the collision penalty function of a point is obtained through its three-layer forward neural network representation for each obstacle. figure 1 A neural network representing the penalty function from a point to an obstacle. The input values of the two nodes in the input layer are the abscissa and ordinate x, y of the path point, each node in the middle layer corresponds to the inequality constraint of a side of the obstacle, and the connection weight between the input layer and the middle layer The coefficient is equal to the coefficient before x and y in the inequality, and the thresh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More