

Permanent magnetic adsorption wheel-type wall-climbing robot
A wall-climbing robot and permanent magnet adsorption technology, which is applied to motor vehicles, transportation and packaging, etc., can solve the problems of inability to integrate control circuits, high production costs, and complex structures, and achieve avoidance of intermediate transmission links, high mobility, and ease of use. Assembly effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The embodiments of the present invention are described in detail below. This embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following implementation example.
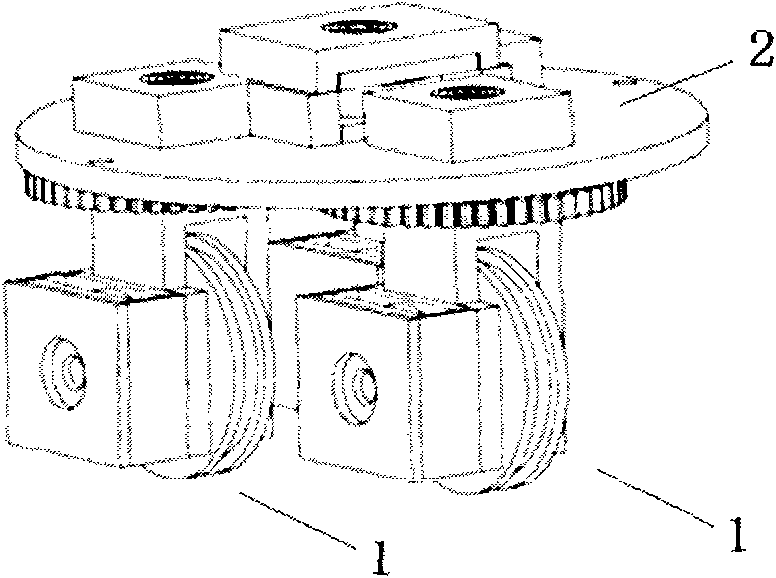
[0017] Such as figure 1 As shown, this embodiment includes: three sets of permanent magnet adsorption climbing wall units 1 and a steering unit 2 with the same structure, wherein: three sets of permanent magnetic adsorption climbing wall units 1 are vertically arranged on the steering unit 2 respectively, and three sets of permanent magnet adsorption wall climbing units The adsorption climbing wall units 1 are parallel to each other.
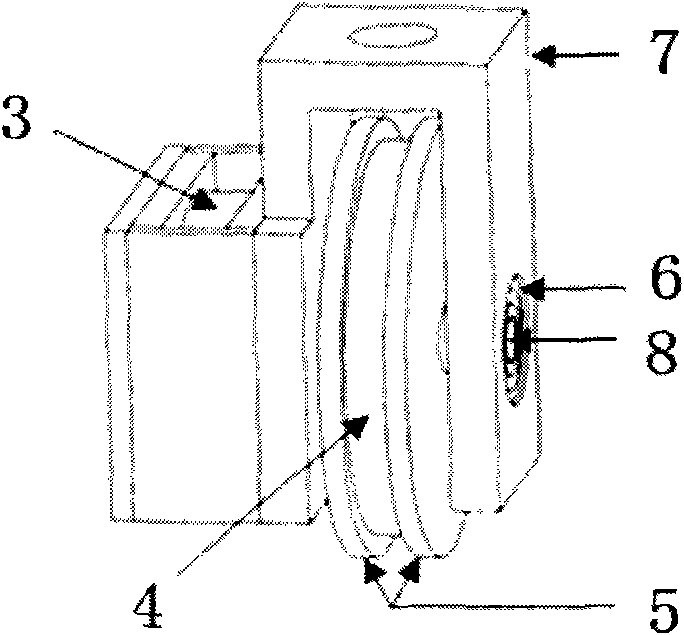
[0018] Such as figure 2 As shown, the permanent magnet adsorption climbing unit 1 includes: a mobile microdrive 3, a permanent magnet 4, two magnetically conductive wheels 5, two ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More