

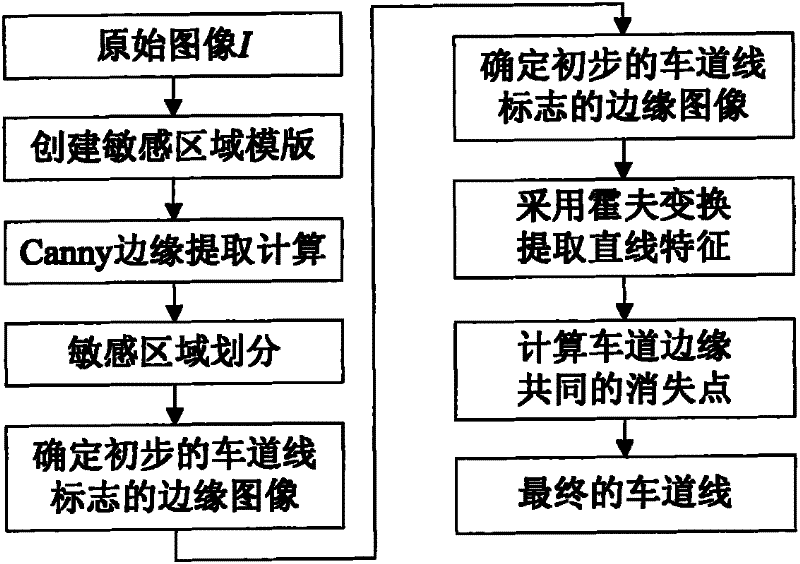
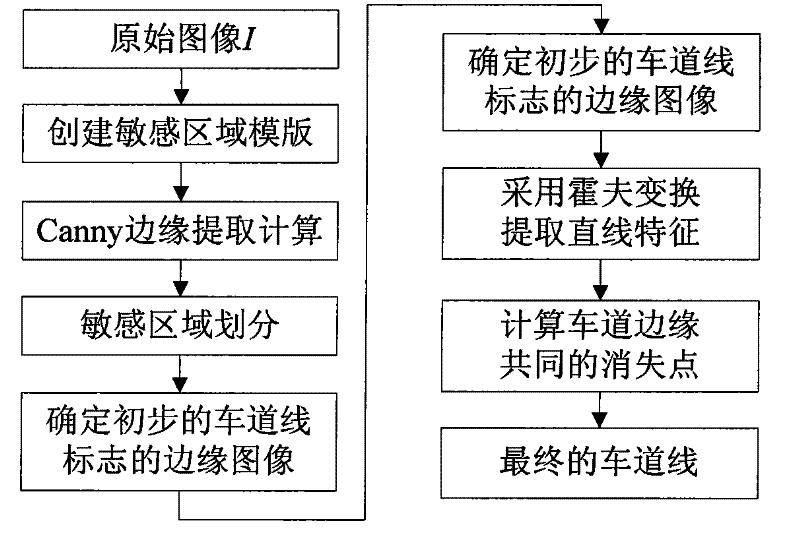
Method for detecting lane lines based on grayscale estimation and cascade Hough transform
A technology of lane line detection and Hough transform, which is applied in computing, road network navigator, image data processing, etc., can solve the problems of camera parameter calibration and installation accuracy requirements are quite high
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0043] Adopt the method of the present invention, at first use C++ language to write lane detection software; Then video camera is installed in the inside of automobile front window, the various parameters of video camera are calibrated, and front image is collected during vehicle running process; Subsequently, put The original image of the vehicle captured is input into the lane detection software as source data for processing; the experiment collects hundreds of source images under several driving situations, and when the driving is relatively stable, the lane detection algorithm of the present invention has a success rate greater than 90 %, when the image is severely blurred by violent bumps, the success rate of lane detection can reach more than 60%. For the original image with a higher resolution of 656×491, the average processing time for each image is about 0.3s, and the operating environment is WinXP 2GHz, the compiler is Visual Studio 2005 C++.
[0044] To sum up, the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More