

2-PPT and PPS spatial parallel robotic mechanism with three degrees of freedom (DOF)
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
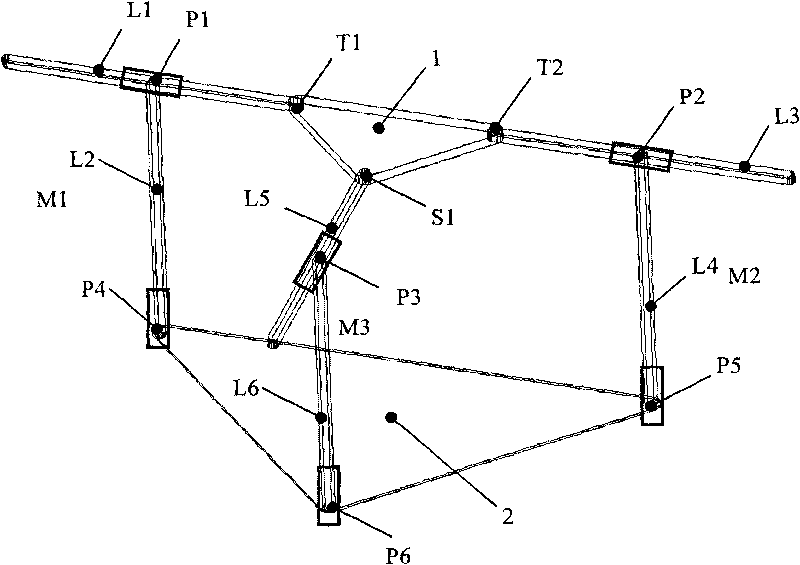
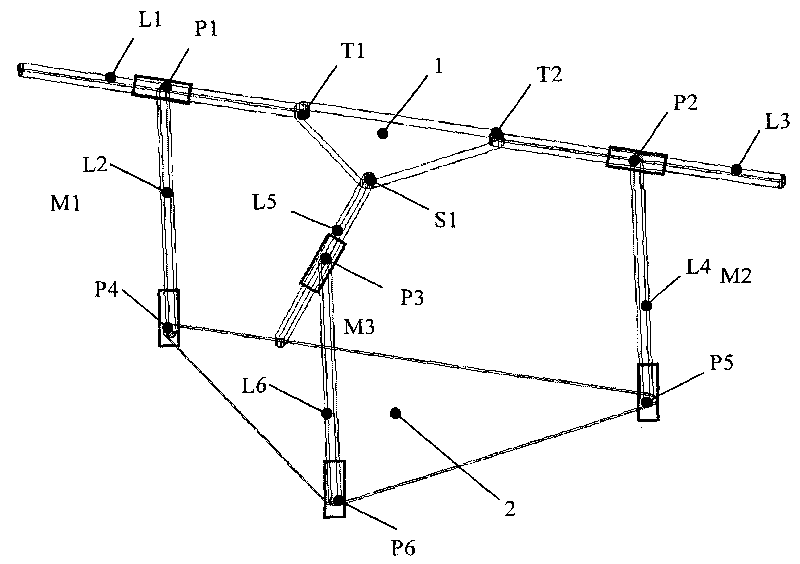
[0020] A spatial parallel robot mechanism with one translation and two rotations realized by using fewer kinematic pairs. The mechanism consists of a moving platform 1, a fixed platform 2, and three branch chains connecting the above two platforms: branch chain M1, branch chain M2, and branch chain M3; the branch chain M1 and branch chain M2 are composed of a Hooke from top to bottom. Hinges T1, T2, two moving hinges P1, P4, P2, P5 and connecting rods L1, L2, L3, L4 between them; branch chain M3 consists of a ball hinge S1, two moving hinges from top to bottom P3, P6 and the link L5 between them, L6 composition. The connecting rods L2, L4, L6 are connected with the fixed platform 2, the movable hinges P4, P5, P6 are the driving pair of the mechanism, and the axes of the movable hinges P1, P2, P3 adjacent to the driving pair are respectively perpendicular to the axis of the driving pair, passing through the tiger Hooke hinges T1, T2 and ball hinge S1 connect the rods L1, L3, L...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More