

Calibration method for lunar rover binocular vision navigation system
A navigation system and binocular vision technology, applied in the direction of measuring devices, instruments, etc., can solve the problems of unsuitable dual cameras, oscillation of fitting parameters, and many undetermined coefficients, and achieve the improvement of low calibration accuracy, simple operation, and improved The effect of work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
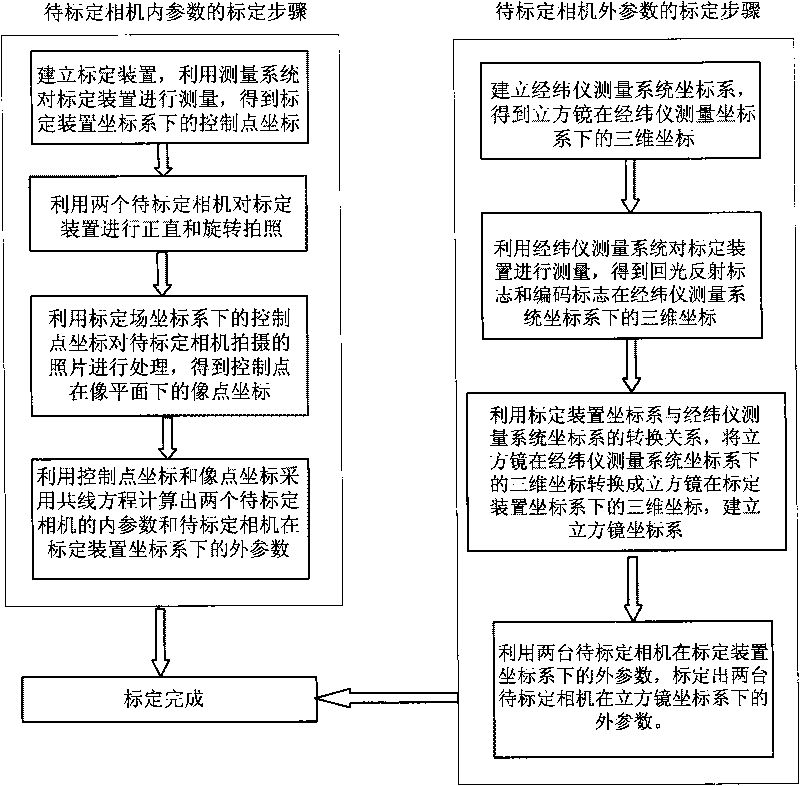
[0084] Steps to calibrate the internal parameters of the camera to be calibrated first:
[0085] (1) Establish a calibration device that includes a circular retroreflective measurement mark and a coding mark with a diameter of 10mm (or a diameter of 8mm) made of reflective materials produced by the US 3M company (models: 7610) and placed in the experiment. Indoors, the three-dimensional coordinates representing the relative position of the calibration device can be obtained. Use the industrial measurement system developed by Zhengzhou Chenwei Technology Co., Ltd. or the V-STARS digital photogrammetry system to measure the retroreflection measurement marks and coding marks in the calibration device. Carry out the measurement to obtain the three-dimensional coordinates of the backlight measurement reflection mark and the coding mark on the calibration device as the control point coordinates, and then convert the control point coordinates into the coordinate system of the calibrat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More