

Positioning structure of negative-pressure adsorption-type wall-surface mobile robot centrifugal impeller
A technology for mobile robots and centrifugal impellers, applied to machines/engines, liquid fuel engines, mechanical equipment, etc., can solve problems such as the impeller rotation axis and rotation plane cannot be guaranteed, the motor rotation cannot be kept stable, and the robot cannot work normally. Meet the performance requirements, rotate smoothly, and have the effect of strong practicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The preferred implementation of the positioning structure of the present invention will be specifically described below in conjunction with the accompanying drawings.
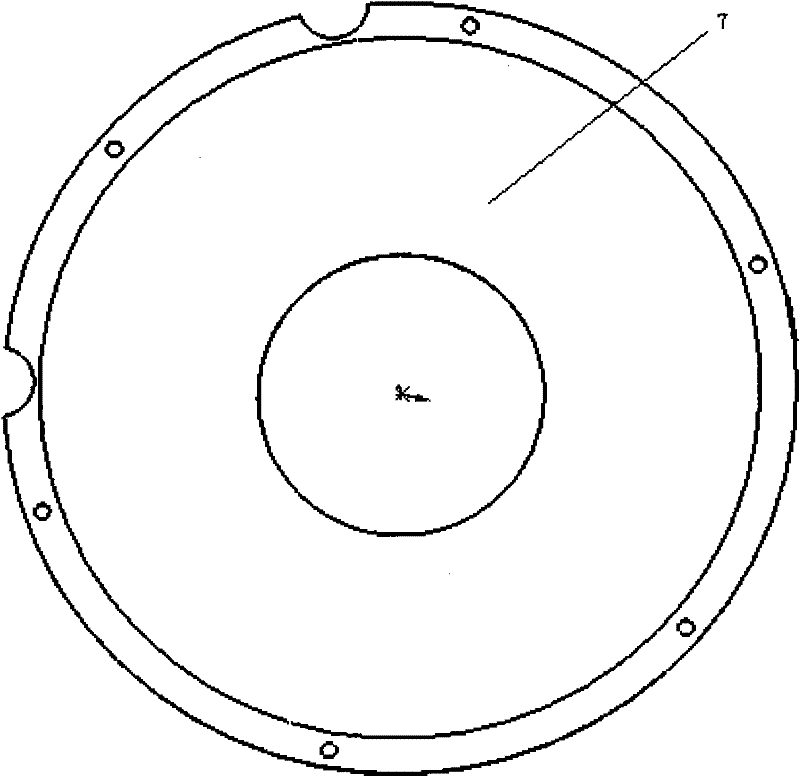
[0019] The radial section of the impeller is a symmetrical trapezoid, and the fitting disk 7 designed in this embodiment is a curved surface of revolution with the same slope as the hypotenuse of the section trapezoid, such as figure 1 shown. The radius of the inner circle of the bonding disc 7 is the same as the radius of the impeller inlet, and a flange is designed on the outer edge of the outer circle to connect with the sealing cavity, and the radius of the flange is equal to the radius of the outer circle of the impeller. The centrifugal impeller is fitted to the fitting disc, and the gap between them is adjusted by a position fine-tuning mechanism.
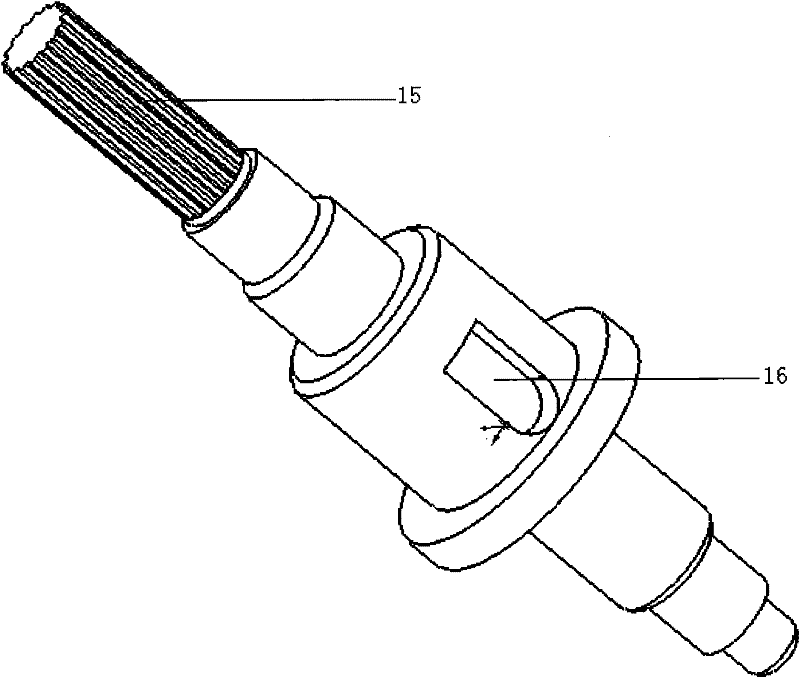
[0020] The impeller shaft 3 of the present embodiment is as figure 2 As shown, two symmetrical key grooves 16 are processed on the part connected w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More