

Bionic galloping robot based on connecting rod mechanism
A link mechanism and robot technology, applied in the field of bionic robots, can solve problems such as large differences in jumping effects, and achieve the effects of super obstacle-crossing ability and strong terrain adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] specific implementation plan
[0034] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
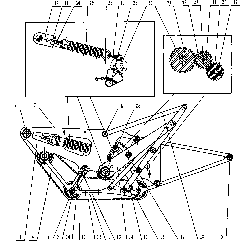
[0035] A bionic jumping robot based on a connecting rod mechanism of the present invention adopts a modular design, and only uses an ordinary geared motor as power to rotate in one direction, and can smoothly and cyclically complete energy storage, quick release, kicking, body off the ground and A series of actions to maintain a stable posture, slide smoothly in the air, automatically retract legs in the air, and land smoothly with cushioning.
[0036] Such as figure 1 Shown, concrete mechanism of the present invention comprises:
[0037] (a) The body 1 is composed of two trapezoidal quadrilateral hollow metal plates, which are used to fix and install other parts of the robot; among the two parallel sides, the long side is called "upper side" 2 and the short side is called "uppe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More