Vehicle steering control device
A technology of steering control and power steering device, which is applied to automatic steering control components, vehicle components, steering mechanisms, etc., and can solve problems such as high cost, reduced vehicle mountability, and high voltage power supply.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
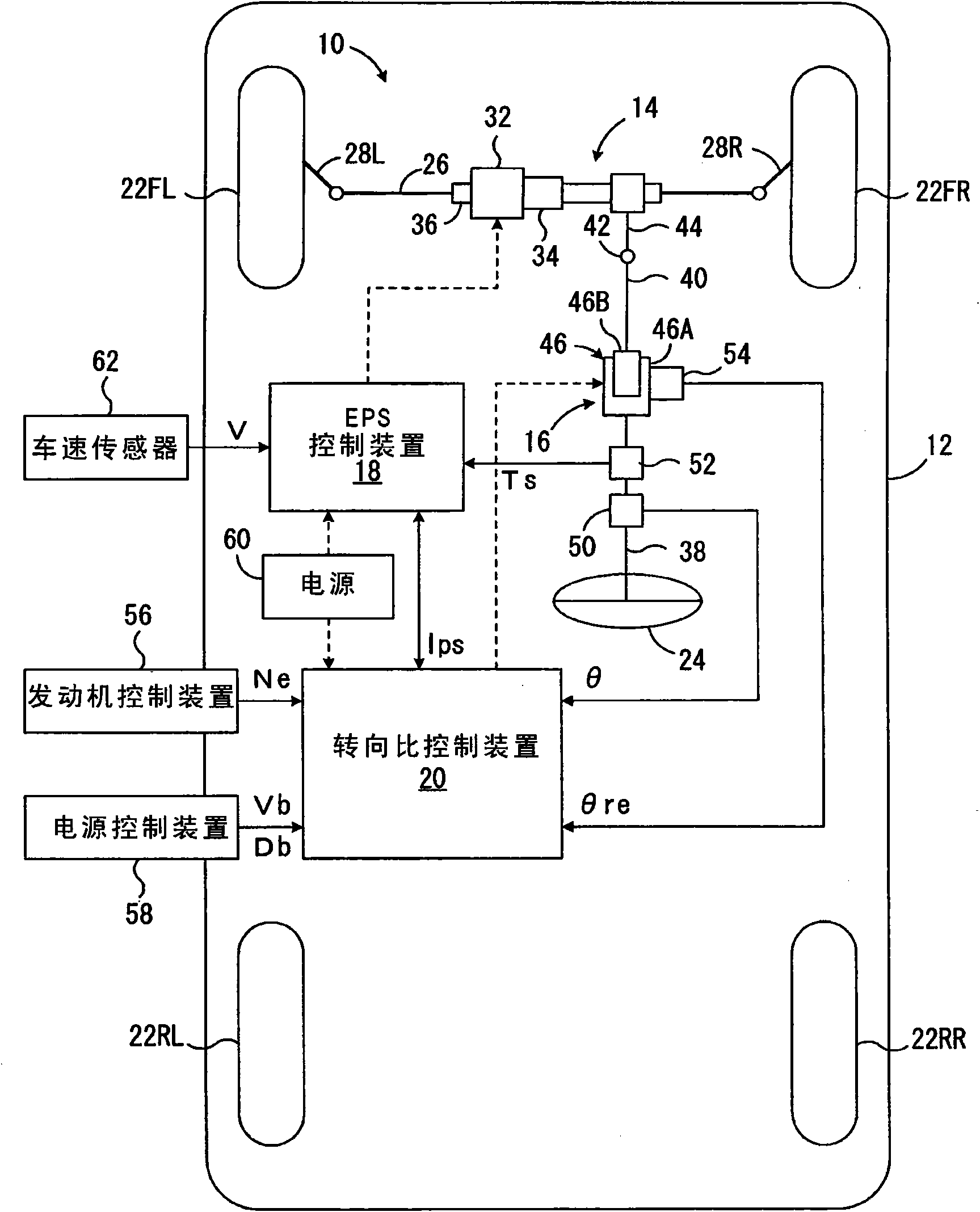
[0100] figure 1 It is a schematic configuration diagram showing the first embodiment of the vehicle steering control device in the present invention.
[0101] exist figure 1 10 generally represents a steering control device of a vehicle 12 , and the steering control device 10 includes a rack and pinion type electric power steering device 14 and a variable steering ratio (VGRS) device 16 . The power steering device 14 and the steering ratio variable device 16 are controlled by an electric power steering (EPS) control device 18 and a steering ratio control device 20 , respectively.
[0102] In addition, although figure 1 Not shown in detail, but the electric power steering control device 18 and the steering ratio control device 20 respectively have a CPU, ROM, RAM, and input / output port devices, and they may also include a microcomputer and a drive circuit interconnected by a bidirectional common bus. In addition, the electric power steering control device 18 and the steering...
no. 2 example
[0146] Figure 9 It is a functional block diagram showing an angle change limit value calculation unit in a second embodiment of the steering control device for a vehicle according to the present invention configured as a modified example of the first embodiment. In addition, based on the second embodiment of Figure 9 The control other than the control of the functional block diagram is performed in the same manner as in the case of the first embodiment described above.
[0147] In this second embodiment, the angle change limit value calculation section 76 has a basic angle change limit value calculation block 118 including a map 117 corresponding to the map 116 of the first embodiment. A basic angle change limit value calculation block 118 calculates a base angle change limit value Δθplimb from the map 117 based on the rotation speed margin Mpd. In addition, the angle change limit value calculation unit 76 has a correction coefficient calculation block 121 including a map ...
no. 3 example
[0158] Figure 11 It is a functional block diagram showing an angle change limit value calculation unit in a third embodiment of the steering control device for a vehicle according to the present invention configured as a modified example of the first embodiment. In addition, based on the third embodiment Figure 11 The control other than the control of the functional block diagram is performed in the same manner as in the case of the first embodiment described above.
[0159] In this third embodiment, the angle change limit value calculation section 76 has the same basic angle change limit value calculation block 118 as in the case of the second embodiment. A basic angle change limit value calculation block 118 calculates a base angle change limit value Δθplimb from the map 117 based on the rotation speed margin Mpd. In addition, the angle change limit value calculation unit 76 has a correction coefficient setting unit 128, and the correction coefficient setting unit 128 fo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More