Manipulator inverse moving method
A robotic arm, reverse motion technology, applied in the direction of manipulators, program-controlled manipulators, instruments, etc., can solve the problems that the calculation results are not optimal, cannot be reached exactly, and the calculation is slow.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
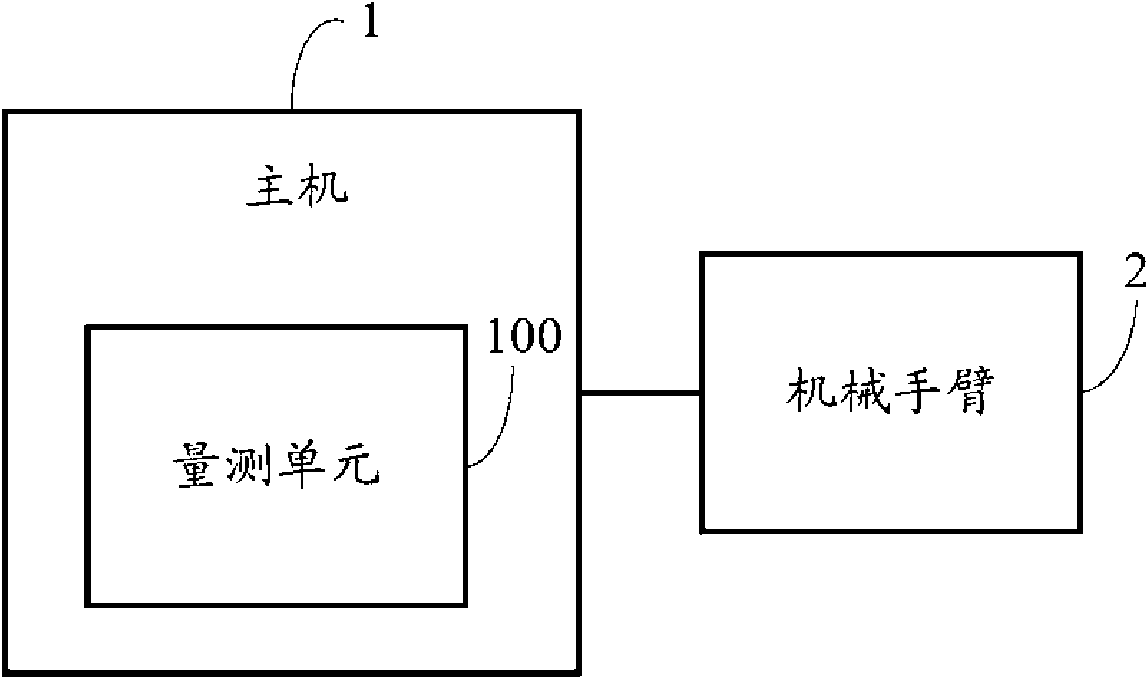
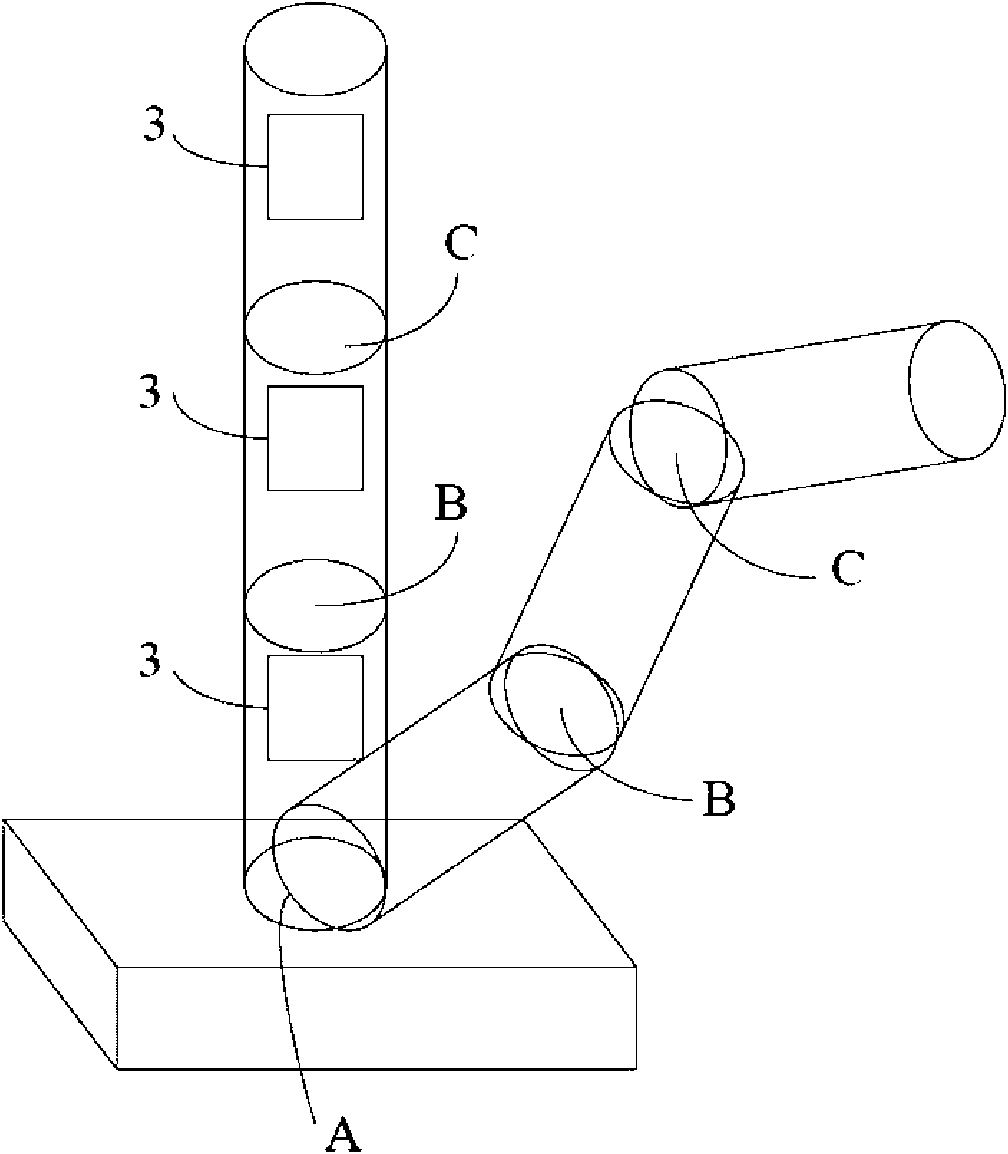
[0010] Such as figure 1 Shown is a hardware architecture diagram of a preferred embodiment of the method for inverse motion of the robotic arm of the present invention. The hardware architecture diagram includes a host 1 connected to a robot arm 2. In this embodiment, the robot arm 2 includes a plurality of joints. Such as figure 2 As shown, it is assumed that the number of joints of the mechanical arm 2 is n, and each joint includes a root node and an end node. When the joint moves, the position of the root node of the joint remains unchanged, and a motor 3 is installed in the end node. The host computer 1 sends motion instructions to the motor 3, and the motor 3 drives the end node to drive the mechanical arm 2 to move. Starting from the end of the robot arm 2 connected to the host computer 1, the joints of the robot arm 2 are named as the nth joint, respectively: the first joint, the second joint, and so on. In this figure, the root node of the first joint is A, and the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More