

Composite PID (Proportion Integration Differentiation) neural network control method based on nonlinear dynamic factor
A nonlinear dynamic and neural network technology, applied in the field of intelligent control with online self-stabilization of parameters, can solve problems such as large amount of calculation, slow algorithm convergence, weak nonlinear control ability, etc., and achieve simple structure, free model prediction, calculation Small amount of effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
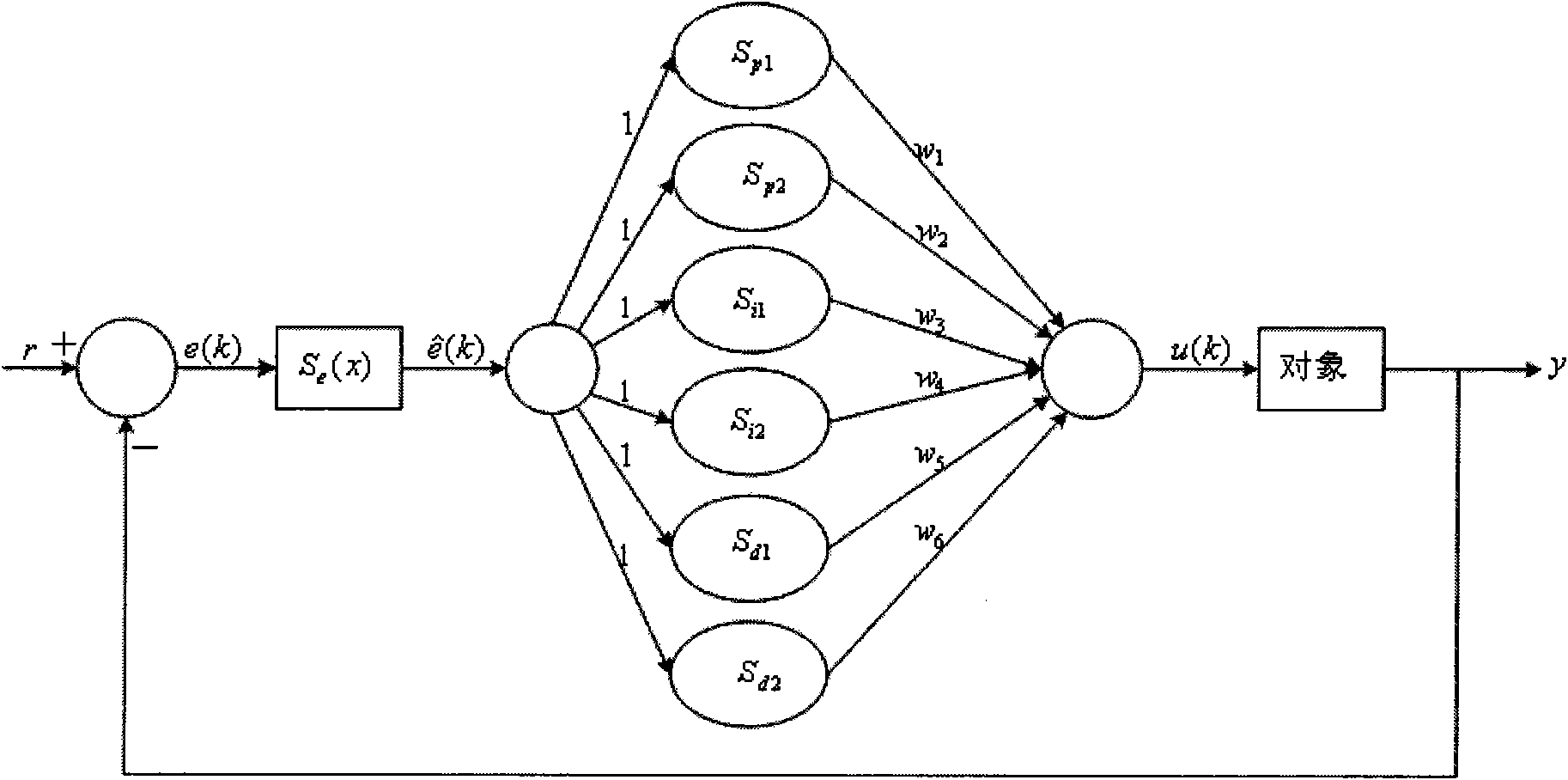
[0013] The present invention will be further described below according to the accompanying drawings.
[0014] 1. Composite PID calculation unit based on nonlinear dynamic factors
[0015] In recent years, foreign countries have proposed an improved scheme for PID controllers stabilized by the Ziegler-Nichols method, namely
[0016] K p m ( k ) = K p ( 1 + k 1 | α ( k ) | ) ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More