

Quadratic polynomial-based nonlinear compound PID (proportional-integral-differential) neural network control method
A neural network and nonlinear technology, applied in the field of automatic control, can solve the problems of unfavorable fast sampling system real-time control, weak nonlinear control ability, and slow algorithm convergence, etc., and achieves convenient nonlinear control, simple structure, and small amount of calculation. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
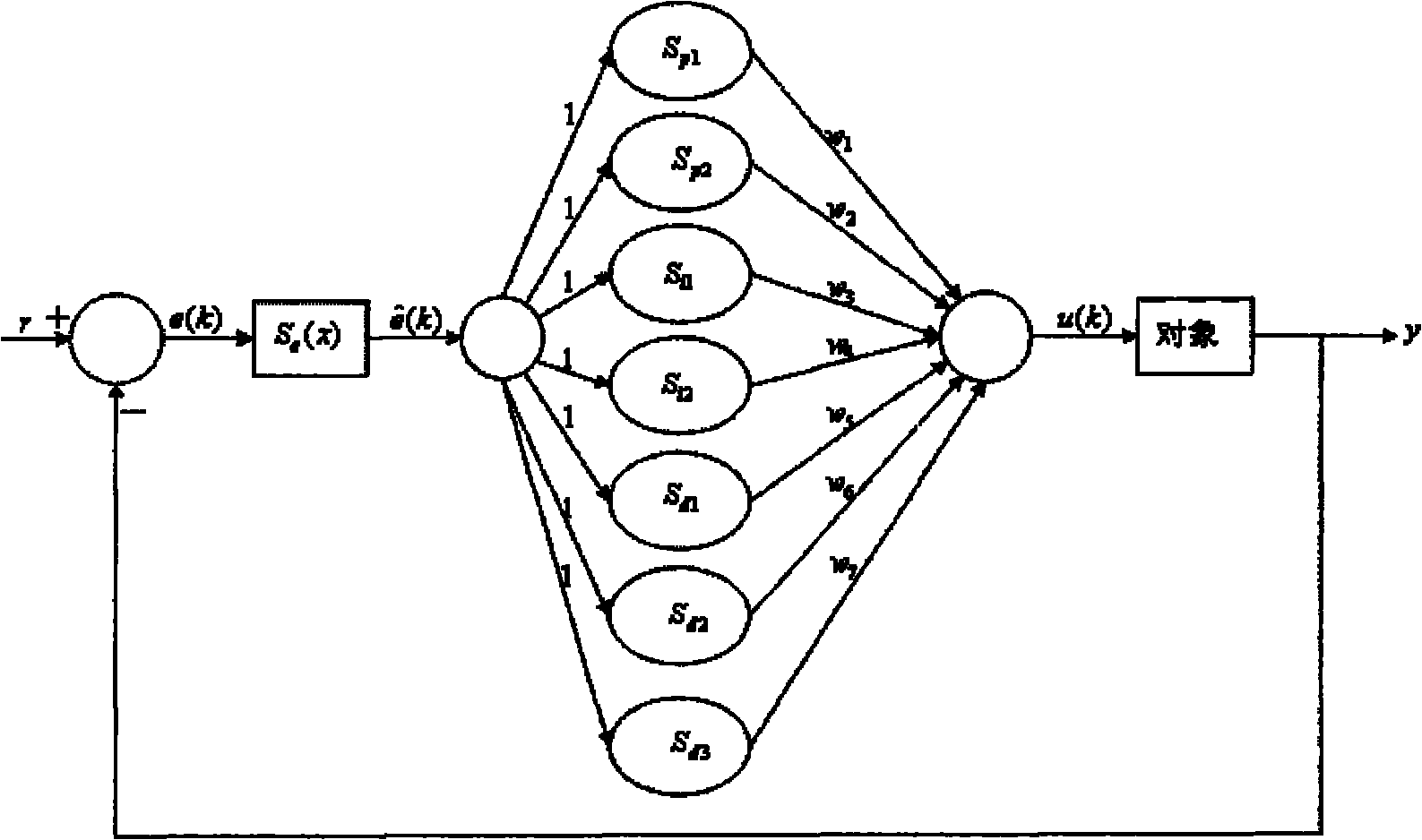
[0015] The present invention will be further described below according to the accompanying drawings.
[0016] 1. Nonlinear composite PID calculation unit
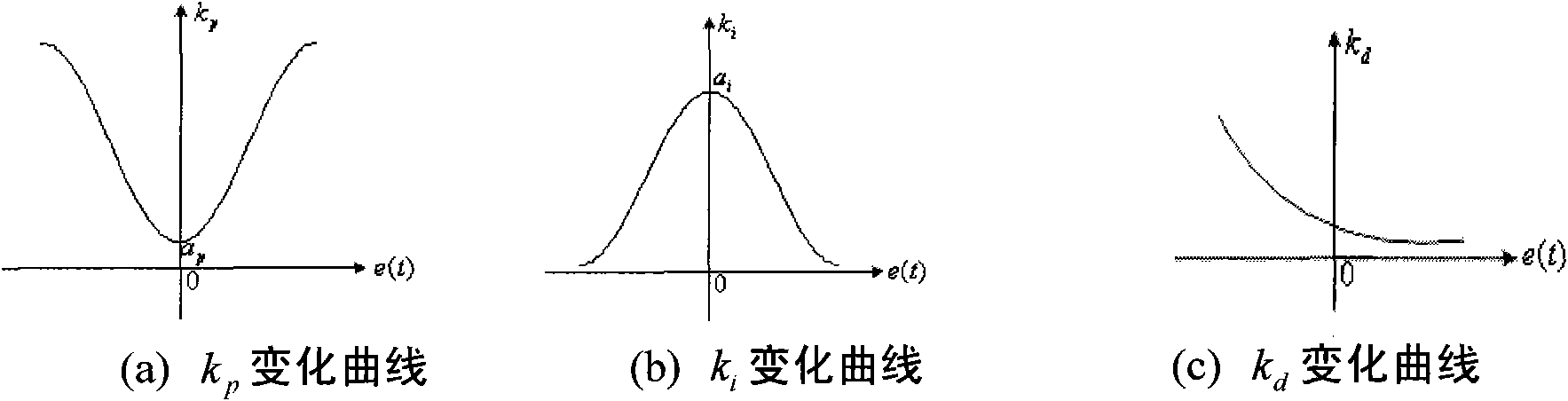
[0017] according to figure 1 The three gains of the PID shown in the trend chart of the change with the error signal, the expression of the three gain parameters can be obtained as follows:
[0018] k p ( e ( t ) ) = w 1 + w 2 e 2 ( t ) ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More