

Method for improving weighing precision of charging system and device thereof
A feeding system and precision technology, applied in the field of feeding systems, to achieve the effects of increasing production costs, improving weighing accuracy, and shielding inaccurate weighing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0044] S11, installing a preset compensation module with a standard weight greater than the maximum positive zero drift value and the maximum negative zero drift value of the weighing hopper on the weighing hopper to generate an original weighing value. There is no fixed requirement on the shape of the preset compensation module, which is convenient to pick and place, such as standard weights. When calibrating the weighing hopper, the preset compensation module is usually removed, and the preset compensation module is put on after calibration.
[0045]Due to the existence of the preset compensation module, there is always a positive original weighing value in the weighing hopper before the material is weighed. Generally, the maximum positive zero drift value and the maximum negative zero drift value are not too large, for example, 20 kg, then a slightly larger preset compensation module of 25 kg can be selected. When the positive zero point drifts 15 kg, the original weighing...
Embodiment 2
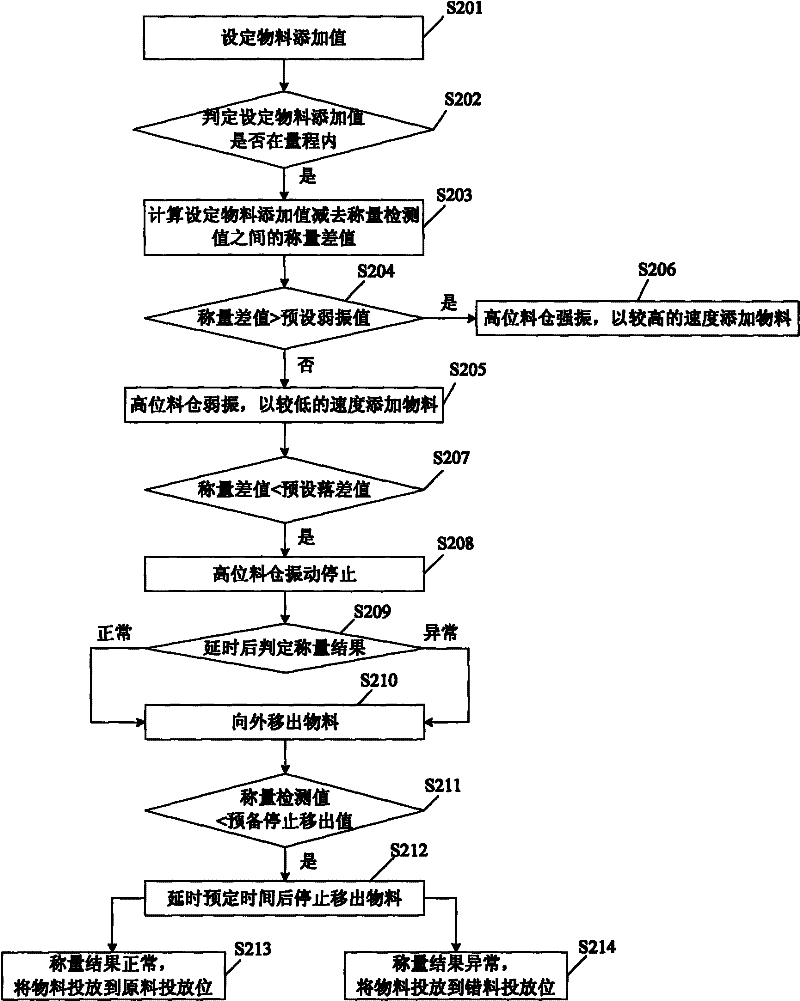
[0053] S603: Calculate the weighing difference of the set material addition value minus the current actual value. Replaces the prior art S203. The purpose of the replacement is to shield the problem of inaccurate weighing caused by the zero point drift, which has been introduced in detail in the first embodiment.
[0054] S611: Judging whether the difference between the weighing detection value minus the original weighing value is less than a predetermined stop-out value. Replaces the prior art S211. The weighing detection value minus the original weighing value is actually the current actual value of the material, the minimum value can reach zero, and the scheduled stop removal value is a positive value, which can meet the conditions in any case and exclude the positive zero point drift zone To ensure the continuous operation of the system. At the same time, when the current actual value is less than the scheduled stop removal value, it can ensure that all materials have b...
Embodiment 3
[0102] The preset compensation module 20 whose standard weight is greater than the maximum positive zero drift value and the maximum negative zero drift value of the weighing hopper 2 is installed on the weighing hopper 2 to generate the original weighing value. There is no fixed requirement on the shape of the preset compensation module, which is convenient to pick and place, such as standard weights.
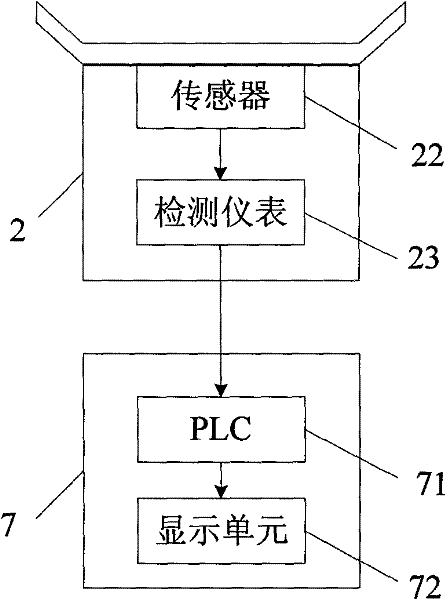
[0103] The control unit 7 includes a calculation unit 701 , a first signal output unit 702 and a second signal output unit 703 .
[0104] The calculation unit 701 is used to calculate the current actual value of the upper material in the weighing hopper 2 according to the original weighing value and the weighing detection value of the weighing hopper 2 . The current actual value can be directly obtained by subtracting the original weighing value from the weighing detection value, of course, it can also be obtained indirectly through other equivalent derivation processes. Rega...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More