

Virtual and real combined robot-assisted finger motion function rehabilitation training system
A robot-assisted, rehabilitation training technology, applied in sports accessories, gymnastics equipment, passive exercise equipment, etc., to achieve comprehensive rehabilitation training, improve the effect of initiative and fun
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The invention will be described in further detail below in conjunction with the accompanying drawings and examples
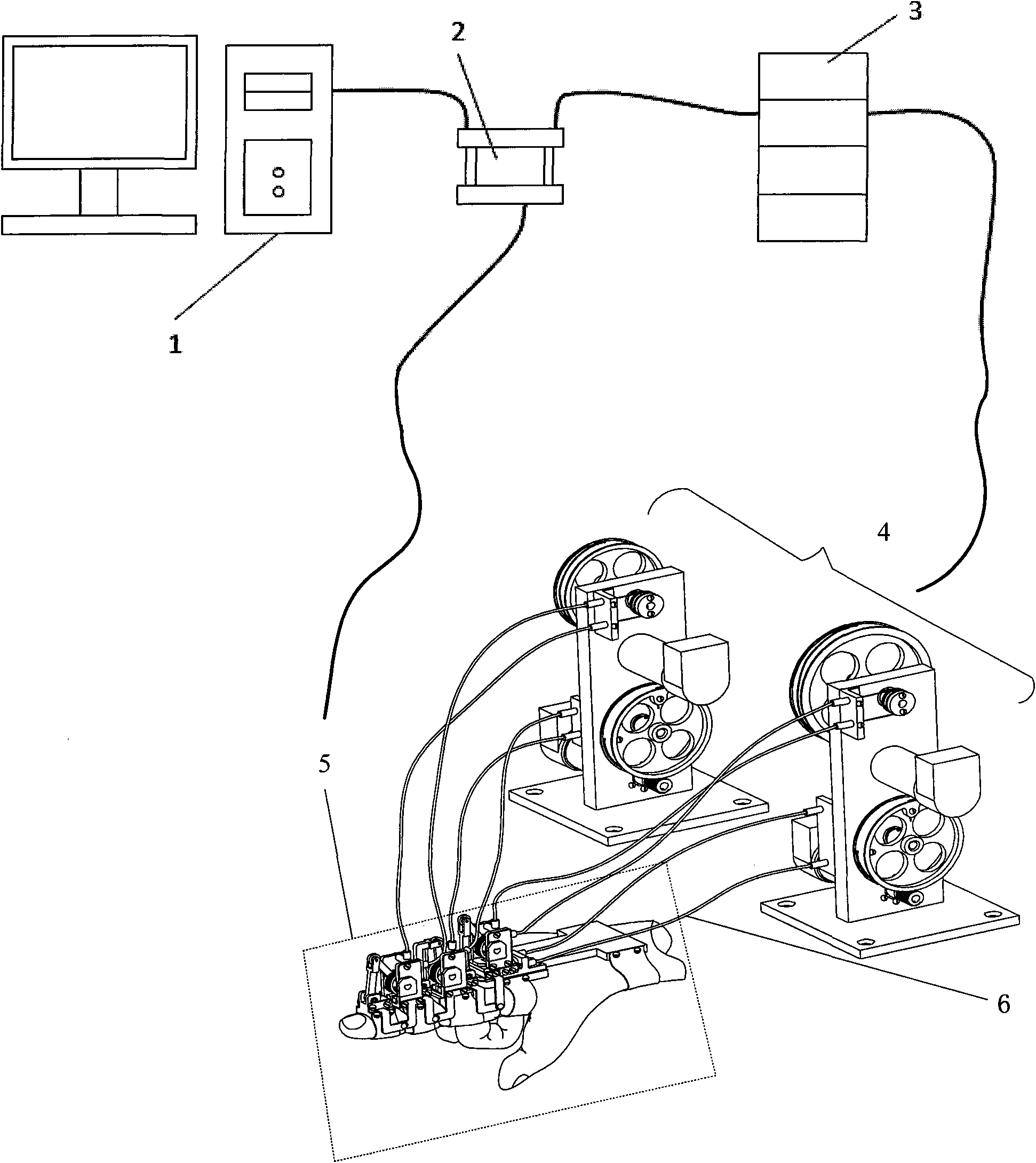
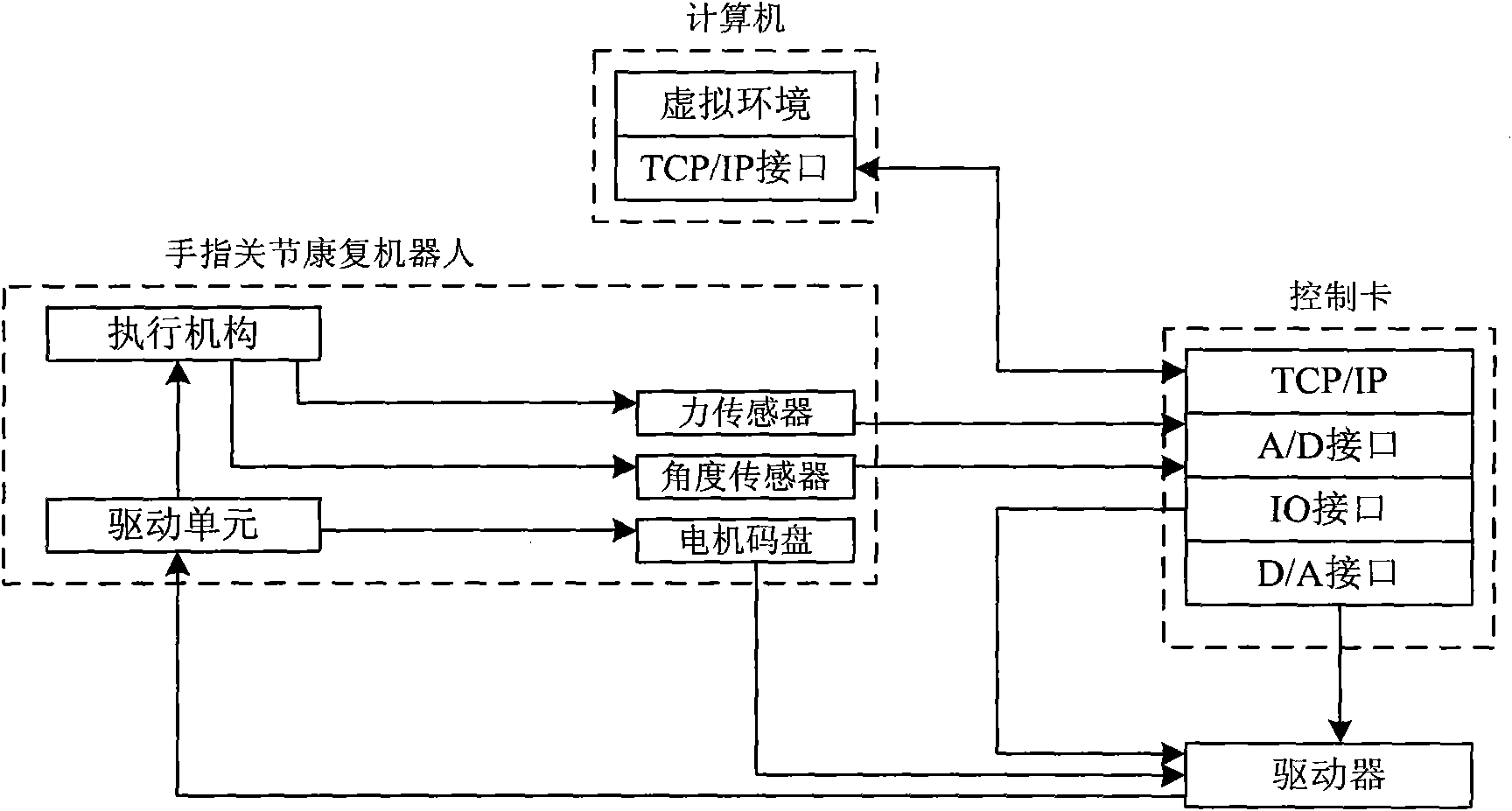
[0029] Such as figure 1 , 3 As shown, in the present invention, the upper computer 1 provides a virtual environment for selection and switching of rehabilitation modes, parameter setting, and image and sound feedback of rehabilitation tasks. The control card 2 communicates with the computer 1 through the network port, and communicates with the driver 3 through the IO channel and the DA channel. The IO channel sends the mode to select the required high and low level, and the DA channel sends the driver 3 to drive the finger joint robot. Control signal for unit 4 to control. The driver 3 controls the motor of the driving unit 4 according to the received IO and DA information. The driving unit 4 and the actuator 5 are driven by means of a wire rope jacket 6 . The angle sensor and force sensor installed on the actuator 5 communicate with the control card...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More