

Medical shoulder rehabilitation training robot
A rehabilitation training and robotics technology, applied in passive exercise equipment, gymnastics equipment, physical therapy and other directions, can solve the problems of single choice, low degree of intelligence, insufficient training, etc., to improve the level and effect, and to have a wide range of applications , the effect of improving the patient experience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] Hereinafter, various embodiments of the present invention will be described in more detail with reference to the accompanying drawings. In the various drawings, the same elements are represented by the same or similar reference numerals. For the sake of clarity, the various parts in the drawings are not drawn to scale.
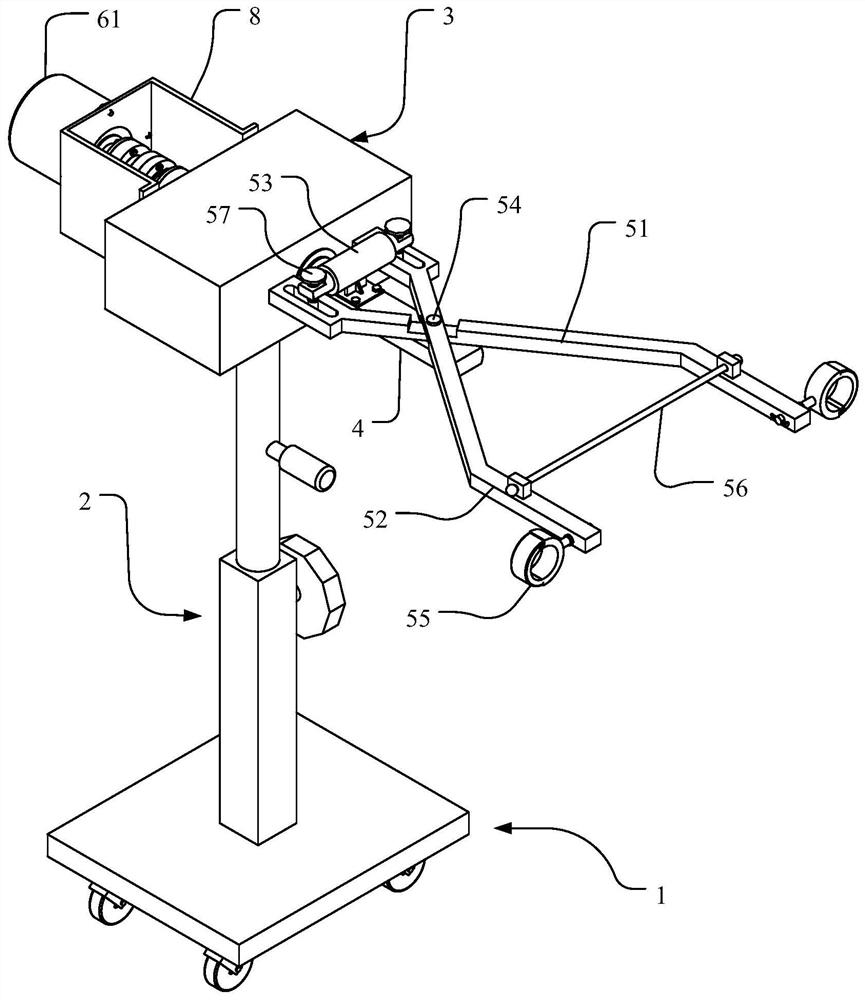
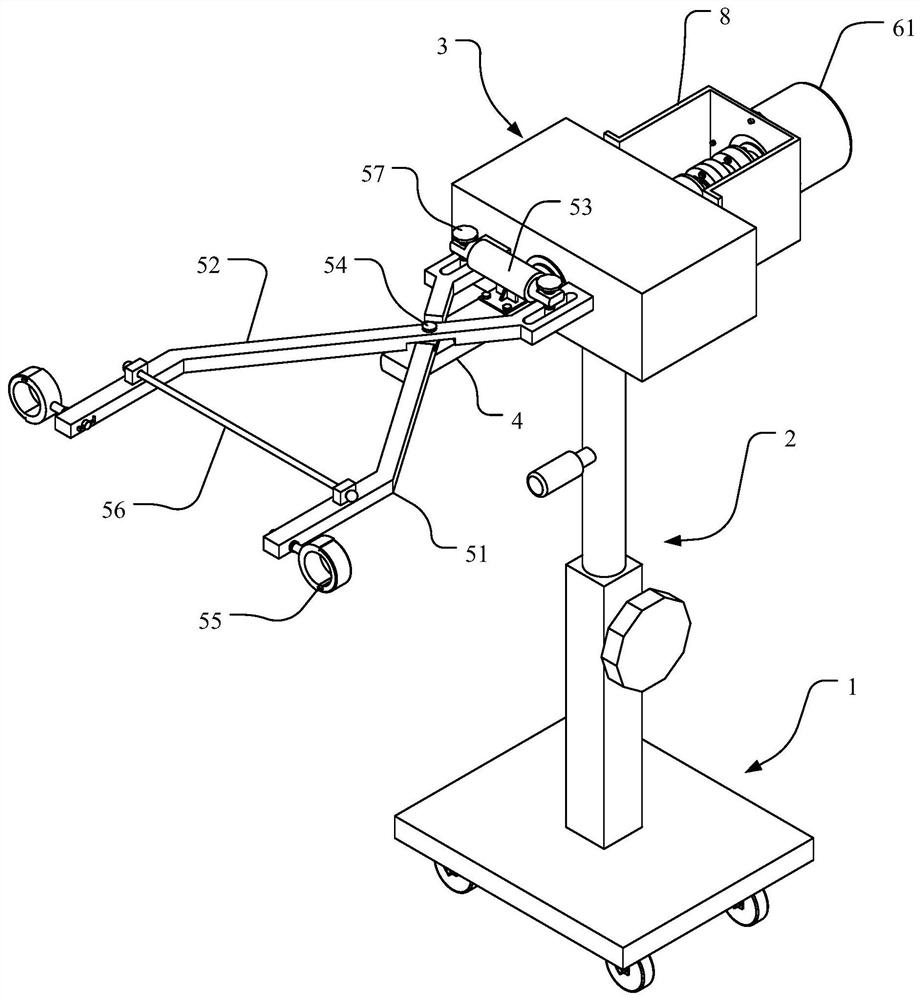
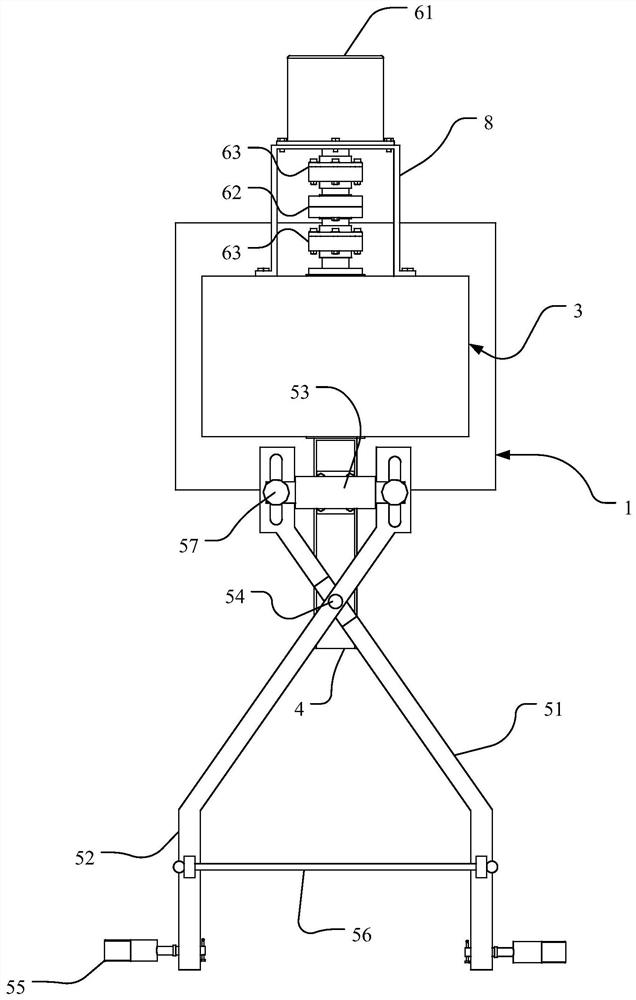
[0042] Such as Figure 1 to Figure 17 As shown, the present invention provides a medical shoulder joint rehabilitation training robot. The medical shoulder joint rehabilitation training robot includes a base 1, a support rod assembly 2, a rotating box 3, a drive shaft 4, and a training mechanism 5. The lower end of the support rod assembly 2 is fixedly connected to the base 1, the rotating box 3 is rotatably connected to the upper end of the support rod assembly 2, the drive shaft 4 is rotatably penetrated on the rotating box 3, and the training mechanism 5 is provided on the drive shaft 4. Come up to perform rehabilitation exercises and perform rehabili...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More