

Method and system for optimizing the layout of a robot work cell
A work cell, robot technology, applied in general control systems, control/regulation systems, instruments, etc., to solve problems such as finding workstations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
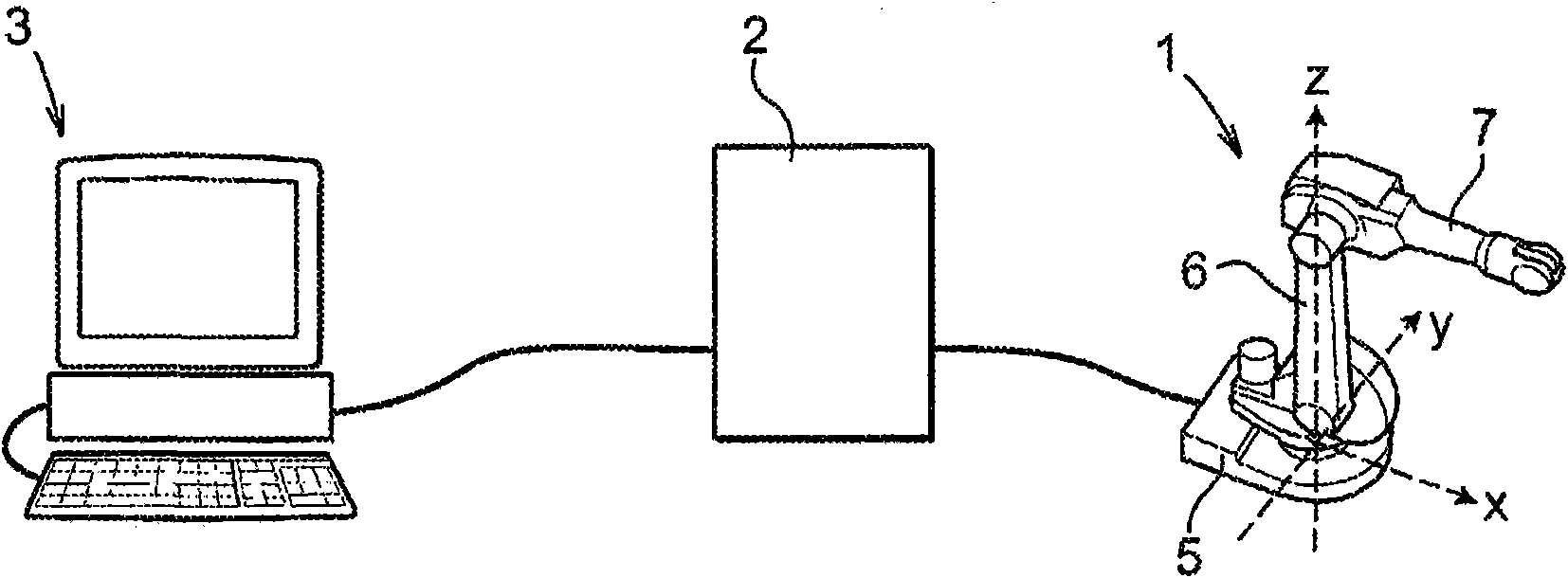
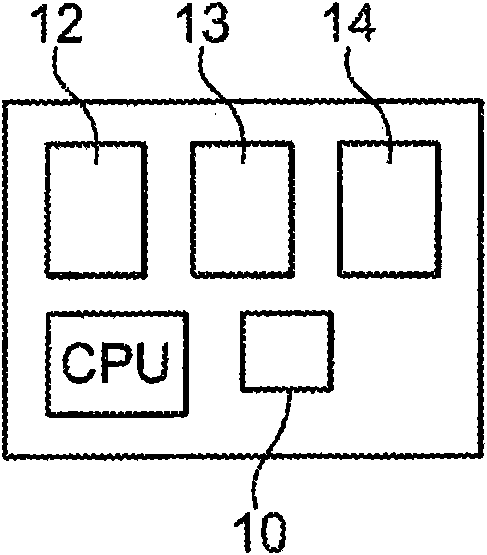
[0047] Figure 1a A robot system is shown comprising a robot 1 , a robot controller 2 and an external computer 3 configured to communicate with the robot controller. The robot includes a plurality of robot parts movable relative to each other. The robot parts are in this case the base 5 and the robot arms 6 , 7 . The base 5 of the robot is arranged in a fixed position relative to the ground. A base coordinate system X, Y, Z is defined relative to the base of the robot. The robot is rotatable with respect to the base in a Z-direction of a base coordinate system of the robot. The robot controller is configured to control movement of the robot according to a control program including instructions for moving the robot along a path to complete a series of tasks on a plurality of workstations. The external computer includes a processor such as a central processing unit (CPU), a memory for storing programs and data, a user input device such as a keyboard and a mouse, a communicati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More