

Wrist device for three degree of freedom (TDOF) underactuated robot
A robot and underactuated technology, applied in manipulators, manufacturing tools, joints, etc., can solve the problems of complex mechanical structure, large volume, and high quality, and achieve the effect of small volume, low cost, and light weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
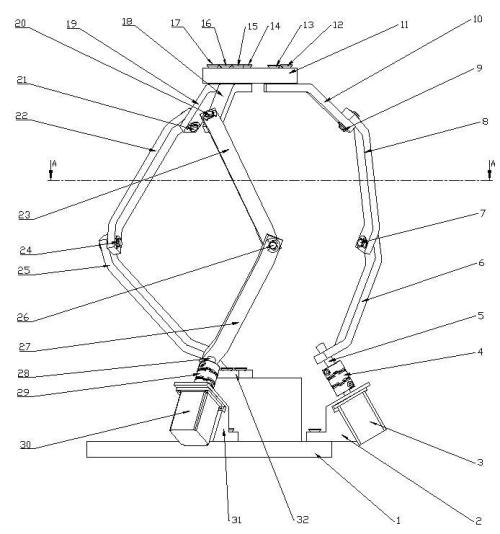
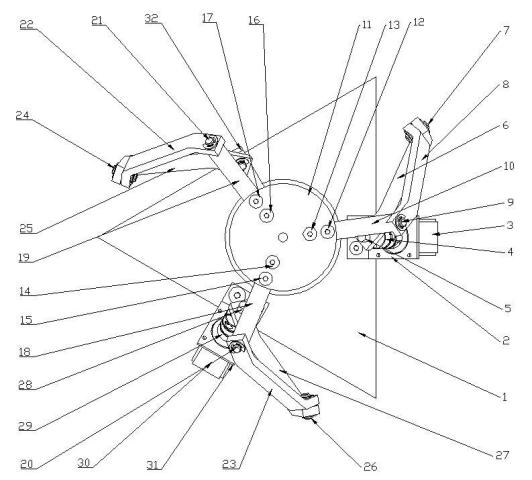
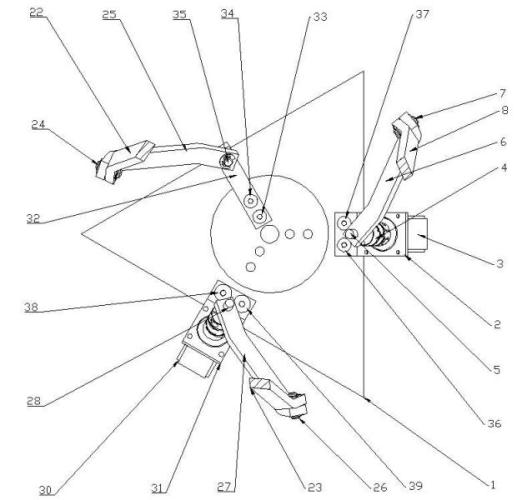
[0019] Embodiment one: see figure 1 , figure 2 , image 3 , the three-degree-of-freedom underactuated robot wrist device includes a static platform, a dynamic platform, three branches and two driving power sources, and is characterized in that: the static platform hinges the dynamic platform through the three branches , two of the three branches are driven by two driving power sources, and the moving platform moves in three degrees of freedom through the transmission of the three branches.
Embodiment 2
[0020] Embodiment two: see figure 1 , figure 2 , image 3 , the structure of the static platform is: one end of a curved base connecting rod (32) is fixed on the upper surface of the base (1) by two screws (33), (34), and the other end is connected to the three branches One of the branches; a first motor fixing seat (2) is also fixed on the upper surface of the base (1) by two screws (36), (37), and the first motor fixing seat (2) and The base connecting rods (32) are spaced at 120°; another second motor fixing seat (31) is fixed on the upper surface of the base (1) by two screws (38), (39), and the second motor fixing seat (31) are spaced 120° apart from the motor holder (2) and the base connecting rod (32).
[0021] The two driving power sources are two motors, and the first motor (3) and the second motor (30) are respectively fixed to the first motor fixing base (2) and the second motor fixing base (31) by bolts Above, the output ends of the first motor (3) and the se...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More