Optimization method for detecting and positioning by detecting instrument
A technology of detecting instruments and optimization methods, which is applied in the field of graphics, can solve problems such as the rapid increase in the number of detecting instruments, and achieve the effect of increasing the number
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0060] Example 1. Reconstruction of polygons in two dimensions
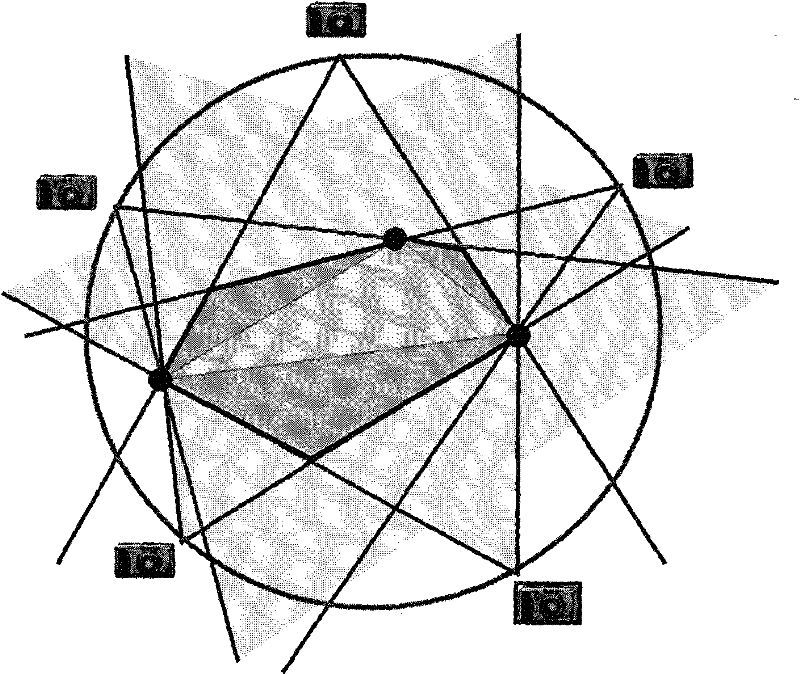
[0061] In the two-dimensional case, such as image 3 As shown, the method in which all cameras are evenly placed on the circumference is optimal.
[0062] Suppose there are K cameras placed on the circumference, M={C 0 , C 1 ,...,C K-1} is the position of the camera in the clockwise direction. Then any camera C i to C i+3 The arc distance along the circumference must be ≤ 2(π-α). Suppose there exists a j such that C j to C j+3 The distance is 2(π-α)+ε, ε>0, then it can be in C i with C i+1 Find an arc length dist(C i , C i+1 )-ε / 2, where dist(C i , C i+1 ) for C i to C i+1 arc distance. The same can be done in C i+1 with C i+3 Find an arc length dist(C i+1 , C i+3 )-ε / 2, the sum of these two arc lengths is:
[0063] dist(C i , C i+1 )-ε / 2+dist(C i+1 , C i+3 )-ε / 2=dist(C i , C i+3 )-ε=2(π-α), there may be a polygon placement position such as Figure 5 As shown, the maximum vertex angle...
Embodiment 2
[0082] Example 2. Reconstruction of polyhedra in three dimensions
[0083] In the three-dimensional case, assuming that all cameras are placed on a spherical surface with a radius of 1, the polyhedron Q we want to reconstruct can be in any direction, located at any position within the sphere, and the maximum face angle of the polyhedron Q does not exceed α. Similarly, each camera can obtain multiple rays tangent to multiple vertices of the polyhedron, and these rays form a polyhedral cone with the camera position as the vertex (see Figure 4 ), several edges of the cone are respectively tangent to several vertices of the polyhedron Q. Therefore, in the three-dimensional case, each vertex of the polyhedron Q needs to be detected by at least two cameras, and we can obtain the position information of the vertex through the intersection of the two tangents detected by the cameras.
[0084] Assume that v is any vertex intersected by N (≥ 3) faces in polyhedron Q, and all face angl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More