

Surgical scissors for surgical robot
A surgical robot and surgical scissors technology, applied in the field of medical equipment, can solve the problems of increasing the cost of surgical equipment, non-replacement of tools, passivation of surgical scissors, etc., and achieves the effect of simple and fast assembly method, reliable assembly effect, and elimination of hysteresis.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be described in detail below in conjunction with specific embodiments.
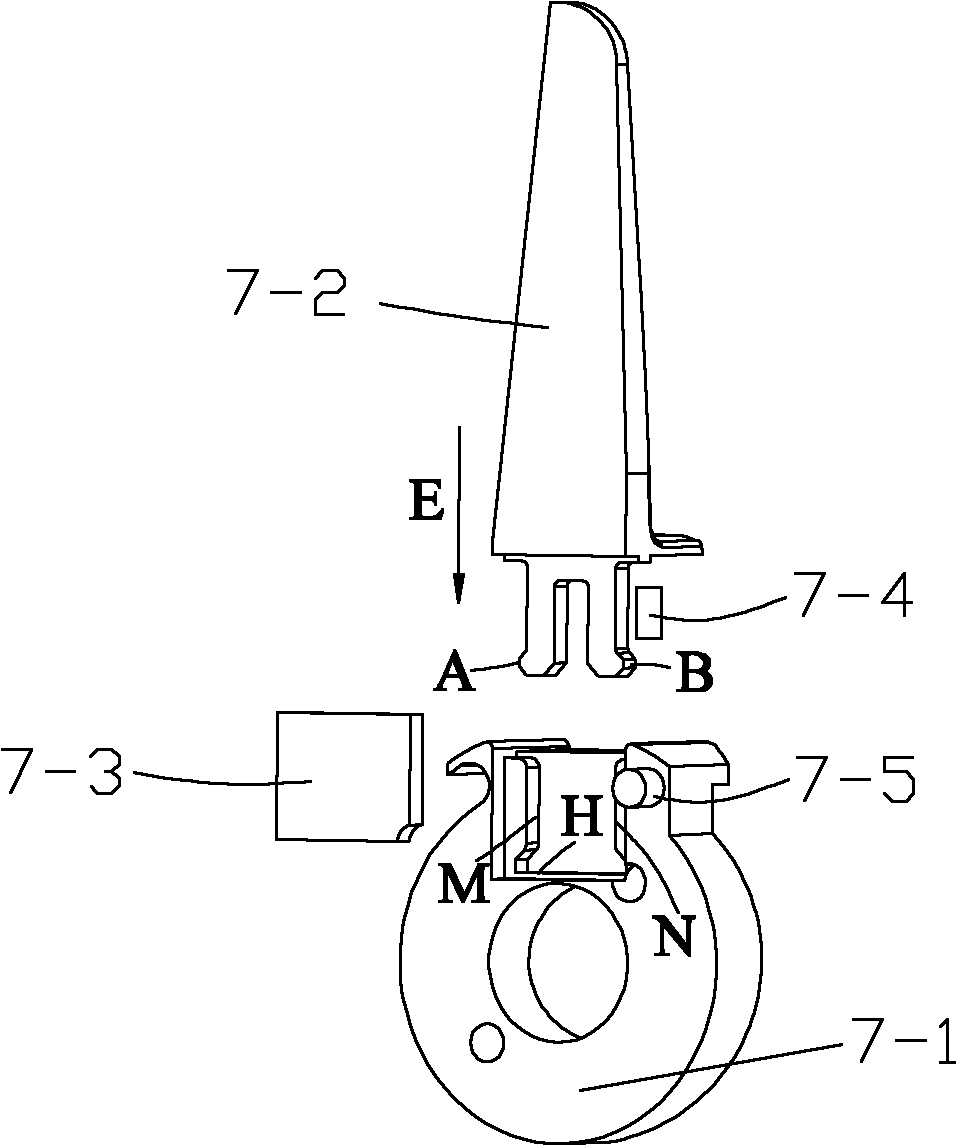
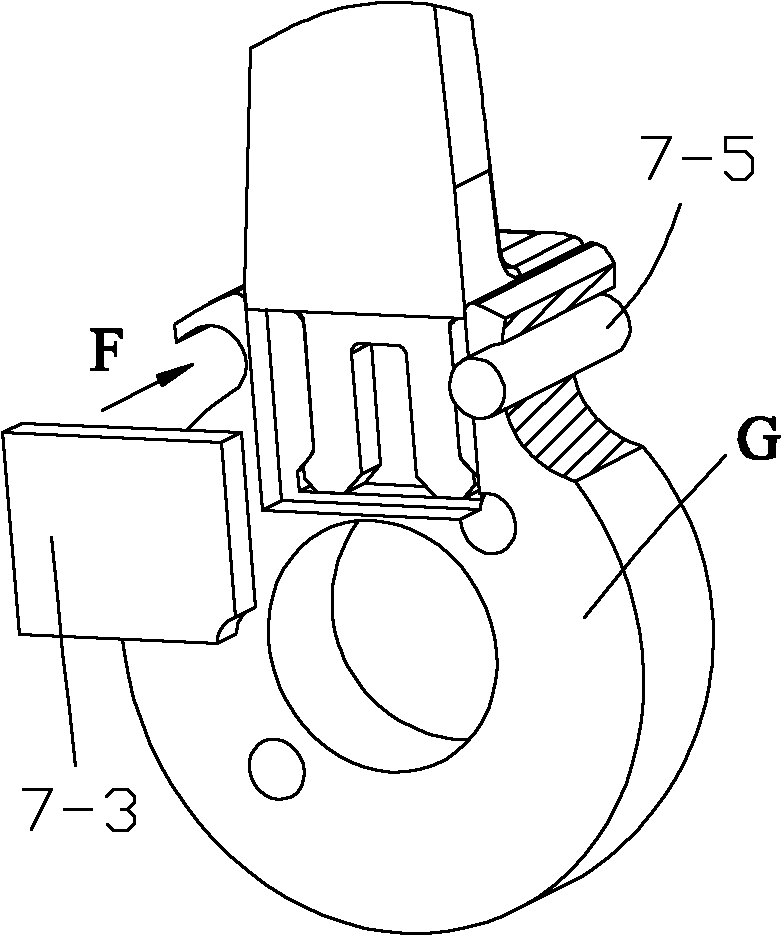
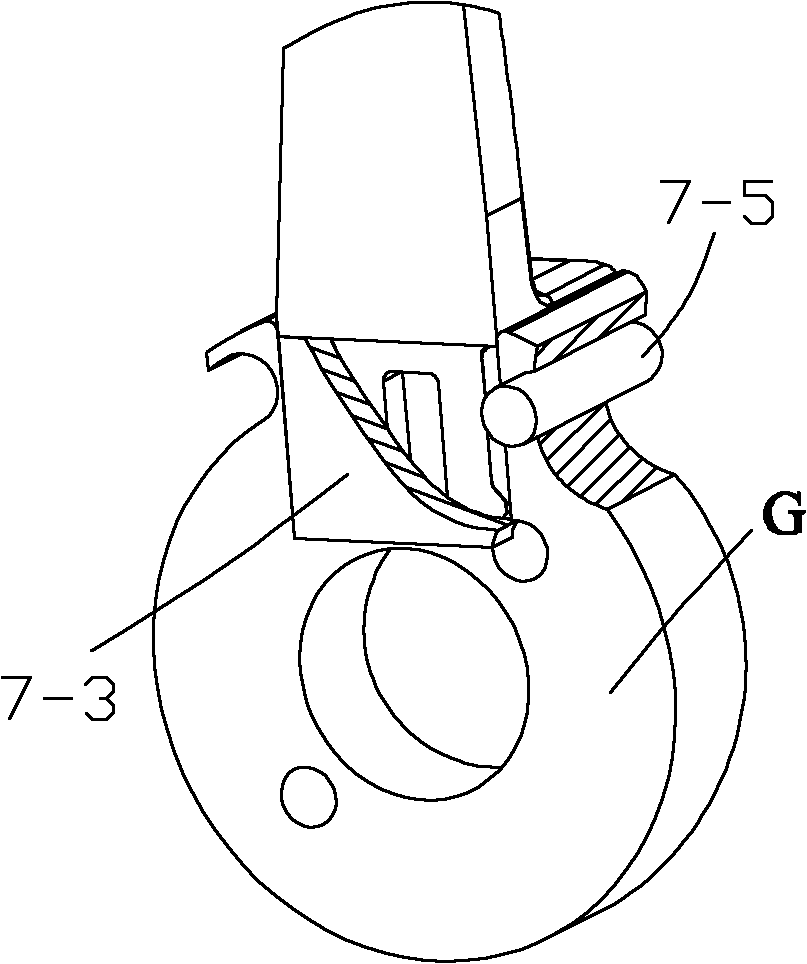
[0028] A kind of surgical scissors for surgical robot of the present invention as shown in the figure, it comprises two scissors blades with identical structure, each scissors blade comprises surgical scissors handle 7-1 and surgical scissors edge 7-2, two surgical scissors handles Connected by a shaft, the bottom wall of the blade of the surgical scissors is connected with an inverted concave circlip, and the bottoms of the two outer walls of the inverted concave circlip are respectively provided with a convex part A, B, on the handle of the surgical scissors 7 -1 The upper part is provided with a concave fixed block, a groove is respectively arranged at the concave corners of the two inner side walls of the groove of the concave fixed block, and the shape of the concave fixed retaining spring is similar to that of the groove of the concave fixed block Matching, the unde...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More